ドメイン駆動設計(DDD)入門
目次:
- はじめに: ドメイン駆動設計とは
- ドメイン駆動設計の要素
- 戦術的設計パターン
- 戦略的設計: ドメイン駆動設計のコンテキストマッピング
- ドメイン駆動設計の実践
- ドメイン駆動設計とアーキテクチャ
- 結論: ドメイン駆動設計の採用を検討する
1. はじめに: ドメイン駆動設計とは
ドメイン駆動設計 (Domain-Driven Design, DDD) は、ソフトウェア開発プロセスにおいて、ビジネスドメイン(業務知識や業務要件)を中心に据え、それを表現するソフトウェア設計手法の一つです。ドメイン駆動設計は、エリック・エヴァンスによって開発されました。
この設計手法は、ビジネス要件が複雑で変更が多いプロジェクトに特に適しており、開発チームがドメインエキスパートと緊密に協力し、モデル駆動設計を通じて効果的なソフトウェアを実現することを目指します。
1.1. ドメイン駆動設計の基本概念
ドメイン駆動設計は、いくつかの基本概念に基づいています。これらの概念は、開発プロセスを通じてビジネスドメインを理解し、表現するための指針を提供します。
- ユビキタス言語 (Ubiquitous Language): プロジェクト全体で共有される言語や用語。ドメインエキスパートと開発チームが同じ言語を使用することで、誤解を減らし、効果的なコミュニケーションを促進します。
- 境界付けられたコンテキスト (Bounded Context): システム内の特定の部分において、モデルや言語が一貫性を持つ範囲。これにより、モデルの整合性を保ちながら、システム全体の複雑性を管理します。
- エンティティ (Entity) と値オブジェクト (Value Object): ドメインモデル内のオブジェクトを表現するための手法。エンティティは一意の識別子を持ち、値オブジェクトは属性によって特徴付けられます。
集約 (Aggregate): ドメインモデル内のオブジェクトのまとまりで、一貫性のあるユニットとして扱われます。集約は、データの整合性を保ちながら、システムのスケーラビリティとパフォーマンスを向上させる役割を果たします。
ドメインイベント (Domain Event): ビジネスドメインにおいて重要な出来事や状態の変化を表現します。イベント駆動アーキテクチャと組み合わせることで、システム全体の柔軟性と可用性を高めることができます。
1.2. ドメイン駆動設計の目的とメリット
ドメイン駆動設計の主な目的は、ビジネスドメインの知識をソフトウェア設計に取り込み、効果的なソフトウェアを実現することです。以下に、ドメイン駆動設計を採用することで得られる主なメリットを挙げます。
- ドメインエキスパートと開発チームのコミュニケーションが向上し、誤解が減ります。ユビキタス言語を用いることで、チーム全体が共通の言語を使用し、効果的なコミュニケーションが可能になります。
- 複雑なビジネス要件を効果的にモデル化できます。境界付けられたコンテキストや集約などの概念を用いることで、システム全体の複雑性を管理しながら、ビジネスロジックを適切に表現することができます。
- ソフトウェアのメンテナンス性が向上します。ドメイン駆動設計では、ドメインモデルが中心となります。これにより、コードの構造が明確になり、変更や拡張が容易になります。
- 開発チームがビジネスドメインの知識を深めることができます。ドメイン駆動設計では、開発チームがドメインエキスパートと緊密に協力し、ビジネスの知識を取り込むことが重要です。これにより、開発チームがビジネスドメインに精通し、より効果的なソフトウェアを開発できるようになります。
以上のように、ドメイン駆動設計はビジネスドメインを中心に据えたソフトウェア設計手法であり、複雑なビジネス要件を効果的にモデル化し、開発チームとドメインエキスパート間のコミュニケーションを強化することを目指します。これにより、以下のような追加のメリットが期待できます。
- 開発プロセスが効率化:ドメイン駆動設計では、ドメインエキスパートと開発チームが密接に連携することで、要件定義や設計の段階で誤解や不明確な点を解消することができます。これにより、開発プロセス全体がスムーズに進み、時間とコストの削減が図られます。
- ソフトウェア品質の向上:ドメイン駆動設計では、ビジネスドメインの知識をソフトウェア設計に適切に反映することで、ビジネス要件を正確に満たすソフトウェアを実現することができます。また、ドメイン駆動設計の概念やパターンを適用することで、ソフトウェアの構造が整理され、安定性や可用性が向上します。
- ビジネス価値の高いソフトウェアの実現:開発チームがビジネスドメインに精通し、ビジネス要件を適切に理解することで、ビジネス価値の高い機能や改善点を見つけやすくなります。これにより、組織全体としての競争力が向上し、市場での成功が期待できます。
2. ドメイン駆動設計の要素
ドメイン駆動設計 (DDD) は、ソフトウェア開発プロセスの中心にドメインの概念を置くことを目指しています。以下では、DDD の主要な要素について説明します。
2.1. ユビキタス言語
ユビキタス言語とは、プロジェクトチーム内で共有される共通の言語や用語のことです。
開発者、プロダクトオーナー、ドメインエキスパートなど、チーム内の異なる役割を持つメンバーが、ドメインの概念やビジネスルールについて明確に理解し、適切にコミュニケーションできるようにするために必要です。ユビキタス言語は、コードの中にも反映され、ドメインに関連するオブジェクトや操作が具体的な名前で表現されます。
2.2. 境界付けられたコンテキスト
境界付けられたコンテキストは、ドメインモデルを適用する範囲や、それらが適用されるコンテキストを明確に定義することです。
これにより、モデルの一貫性を維持しつつ、複雑なドメインを分割して管理することができます。コンテキストの境界は、モデル間の相互作用や、異なるコンテキストでのモデルの変換方法を明確にします。
2.3. エンティティと値オブジェクト
エンティティは、独自の識別子を持ち、そのライフサイクルに沿って状態が変化するオブジェクトです。
識別子によって同一性が判断されるため、属性が同じであっても、識別子が異なれば異なるエンティティとみなされます。
一方、値オブジェクトは、状態が変化しない不変のオブジェクトで、属性によって同一性が判断されます。
エンティティと値オブジェクトを適切に使い分けることで、ドメインモデルの整合性を保ちながら、複雑さを抑えることができます。
2.4. 集約
集約は、ドメインモデル内の関連するオブジェクトのグループです。
集約は、集約は、一つのルートエンティティを持ち、それを通じて他のオブジェクトにアクセスします。ルートエンティティは、集約内の他のオブジェクトに対する操作を調整し、ビジネスルールを適用します。集約は、整合性の境界を明確にし、トランザクションを制御することができます。
集約の設計原則には、以下の3点が挙げられます。
- 集約内のオブジェクトは、ルートエンティティを介してアクセスされること。
- 集約の境界に沿って、整合性を保つためのトランザクション制御が行われること。
- 集約が他の集約への参照を持つ場合、その参照はIDによって行われること。
これらの原則に従うことで、システム全体の整合性が向上し、複雑さが抑えられます。
2.5. ドメインイベント
ドメインイベントは、ドメイン内で重要な状態の変化を表すもので、システムが反応すべき事象を定義します。
ドメインイベントは、通常、名詞+動詞の形式で表現され、過去形で記述されることが多いです(例:注文が確定された、商品が出荷されたなど)。
ドメインイベントを利用することで、システム間の結合を緩和し、拡張性や保守性を向上させることができます。また、イベント駆動アーキテクチャや、マイクロサービスといったアーキテクチャパターンとの相性が良いため、DDDと組み合わせることが多いです。
3. 戦術的設計パターン
ドメイン駆動設計(DDD)における戦術的設計パターンは、ドメインオブジェクトの振る舞いと構造を実現するために使用される一連のパターンです。これらのパターンは、コードの品質を向上させるだけでなく、ドメインの知識を効果的に表現するのに役立ちます。ここでは、主要な戦術的設計パターンについて説明します。
3.1. リポジトリ
リポジトリは、ドメインオブジェクト(主にエンティティ)の永続化と復元を担当するパターンです。
リポジトリは、ドメインオブジェクトとデータストア(データベースや外部サービス)との間の抽象化レイヤーを提供し、ドメインロジックがデータストアの詳細を気にすることなく、オブジェクトの操作に集中できるようにします。
3.2. ファクトリー
ファクトリーは、ドメインオブジェクトの生成と構築を担当するパターンです。
オブジェクトの生成が複雑であったり、特定の状態で初期化する必要がある場合、ファクトリーを使用してオブジェクトの生成ロジックをカプセル化することができます。これにより、コードの可読性が向上し、オブジェクトの生成に関する知識が一元化されます。
3.3. サービス
サービスは、ドメインオブジェクトの振る舞いを実現するパターンで、特定のエンティティや値オブジェクトに属さないドメインロジックをカプセル化します。
サービスは、オブジェクト間の協調やデータ変換など、複数のドメインオブジェクトをまたがる操作を実行する場合に特に役立ちます。
3.4. アプリケーションサービスとドメインサービス
アプリケーションサービスは、ドメインオブジェクトを操作するためのAPIを提供し、ドメインサービスと連携してユースケースを実現します。
アプリケーションサービスは、トランザクション管理やセキュリティなどのインフラストラクチャに関する関連事項を扱い、ドメインサービスとの橋渡し役を果たします。一方、ドメインサービスは、ドメインのビジネスロジックに焦点を当て、状態を持たないサービスとして実装されます。これにより、ドメインロジックが明確に表現され、ビジネスルールが適切に実装されます。
アプリケーションサービスとドメインサービスの違いは、責任範囲と対象となるロジックです。アプリケーションサービスは、ドメインのロジックに直接関与せず、ユースケースを実行するためのプロセスを調整します。一方、ドメインサービスは、ドメインモデルに関連するビジネスロジックを実装し、ドメインオブジェクトが持つべきではないロジックをカプセル化します。
4. 戦略的設計: ドメイン駆動設計のコンテキストマッピング
戦略的設計は、ドメイン駆動設計のプロセスにおいて、システム全体の構造と相互作用を考慮する段階です。コンテキストマッピングは、システム内の異なるドメインやサブドメインがどのように関連し、互いに影響を与えるかを理解するための手法です。以下に、戦略的設計における主要なパターンを紹介します。
4.1. 共有カーネル
共有カーネルは、複数の境界付けられたコンテキスト間で共有されるドメインモデルの一部を指します。これにより、チームは重要な概念やロジックを一元化し、重複や矛盾を避けることができます。共有カーネルは、慎重に管理され、変更には全チームの合意が必要です。
4.2. カスタマーサプライヤー
カスタマーサプライヤーは、1つの境界付けられたコンテキストが他の境界付けられたコンテキストのニーズに応える関係を表します。カスタマー側のチームは、サプライヤー側のチームが提供する機能やデータに依存します。このパターンは、依存関係を明確にし、両チーム間での協力を促進します。
4.3. アンチコラプションレイヤー
アンチコラプションレイヤーは、境界付けられたコンテキスト間の通信を独立させる層です。これにより、1つのコンテキストの変更が他のコンテキストに悪影響を与えるのを防ぎます。アンチコラプションレイヤーは、データ変換やアダプターパターンを用いて、異なるドメインモデル間での情報のやりとりを可能にします。
4.4. オープンホストサービス
オープンホストサービスは、境界付けられたコンテキストが、他のコンテキストや外部システムと通信するために公開するAPIやプロトコルです。これにより、システムの拡張性や統合性が向上します。オープンホストサービスは、標準化されたインターフェースと良好なドキュメントを提供することが重要であり、他のチームやシステムとの連携を容易にします。
4.5. 発行者/購読者
発行者/購読者パターンは、境界付けられたコンテキスト間で非同期通信を行う方法です。このパターンでは、1つのコンテキスト(発行者)がドメインイベントを生成し、他の関心のあるコンテキスト(購読者)がそのイベントを受け取り、処理します。発行者と購読者は、疎結合であるため、互いに影響を与えることなく進化・拡張が可能です。
発行者/購読者パターンは、マイクロサービスアーキテクチャやイベント駆動アーキテクチャにおいて特に有効であり、システム全体のスケーラビリティや柔軟性を向上させます。
これらの戦略的設計パターンを適切に適用することで、ドメイン駆動設計はシステムの構造や相互作用を整理し、チーム間の協力やコミュニケーションを促進します。結果として、プロジェクトはより効率的に進められ、システムの品質やメンテナンス性が向上することが期待されます。
5. ドメイン駆動設計の実践
5.1. ドメイン駆動設計の導入方法
ドメイン駆動設計(DDD)を導入するためには、以下の手順が推奨されます。
- ドメインエキスパートと協力して、対象となるドメインを理解する。ユビキタス言語を作成し、チーム全員が共通の言語を使用することを確認する。
- 境界付けられたコンテキストを特定し、サブドメイン間の関係を明確化する。コンテキストマッピングを使用して、サブドメイン間の相互作用を視覚化する。
- エンティティ、値オブジェクト、集約、ドメインイベントを特定し、ドメインモデルを設計する。
- リポジトリ、ファクトリー、サービスなどの戦術的設計パターンを適用して、モデルの永続化やビジネスロジックの実装を行う。
- イテレーティブな開発プロセスを適用し、フィードバックを受け入れてドメインモデルを改善する。
5.2. ドメイン駆動設計におけるチームの役割
DDDにおけるチームの役割は、以下のようになります。
- ドメインエキスパート: ビジネスの専門知識を持ち、開発チームと協力してドメインモデルを構築します。
- ソフトウェア開発者: ドメインモデルをもとに、ソフトウェアの設計と実装を行います。開発者は、ユビキタス言語を使用してドメインエキスパートとコミュニケーションします。
- アーキテクト: システム全体のアーキテクチャを設計し、技術選定や戦略的設計の決定を行います。
5.3. ドメイン駆動設計プロジェクトの進め方
DDDプロジェクトを進める際には、以下のポイントに注意してください。
イテレーティブな開発: DDDは、ドメインの知識が不完全な状態から始まることが一般的です。そのため、継続的にフィードバックを受け入れてドメインモデルを改善することが重要です。短期的なリリースサイクルを使用して、頻繁に機能をリリースし、ドメインエキスパートとのコラボレーションを維持します。
ユビキタス言語の維持: プロジェクト全体でユビキタス言語を維持することが重要です。チーム内で用語や概念に関する矛盾があれば、それを解決し、言語を統一します。ドキュメントやコード内での用語の整合性も保ちます。
コンテキストマッピングの活用: コンテキストマッピングを活用して、サブドメイン間の相互作用や依存関係を明確にし、それに基づいて戦略的設計を行います。
ドメインモデルの継続的なリファクタリング: ドメインモデルは、ドメイン知識が進化するにつれて変更されるべきです。継続的なリファクタリングを行い、ドメインモデルを最新の状態に保ちます。
チームの教育とスキル向上: DDDの概念やパターンに習熟することが、プロジェクトの成功につながります。チームメンバーにDDDに関する教育やトレーニングを提供し、スキルを向上させることが重要です。
適切なアーキテクチャの選択: DDDプロジェクトでは、ヘキサゴナルアーキテクチャやクリーンアーキテクチャなど、適切なアーキテクチャを選択して適用することが重要です。これにより、ドメインロジックと技術的な詳細が分離され、システムの柔軟性が向上します。
総合的に、ドメイン駆動設計プロジェクトの進め方は、イテレーティブな開発、ユビキタス言語の維持、コンテキストマッピングの活用、ドメインモデルの継続的なリファクタリング、チームの教育とスキル向上、そして適切なアーキテクチャの選択を意識して進めることが求められます。これらのポイントに注意しながら、プロジェクトを適切に推進し、成功に導くことができます。
モデリングワークショップの実施: チームとドメインエキスパートとの間で、定期的にモデリングワークショップを開催することが効果的です。これにより、ドメインモデルの改善や新たな知見の発見、チーム内での共通理解の構築が容易になります。
テスト駆動開発の適用: テスト駆動開発(TDD)をDDDプロジェクトに適用することで、ドメインモデルの品質向上やリファクタリングの容易さが向上します。TDDは、開発者がドメインモデルに関する仕様を理解し、適切な実装を行うのに役立ちます。
パフォーマンスやスケーラビリティへの配慮: DDDプロジェクトでは、ドメインモデルの複雑性が増すことがあります。そのため、パフォーマンスやスケーラビリティへの配慮が重要です。アーキテクチャや設計の段階で、パフォーマンスやスケーラビリティに関する要件を明確にし、適切な戦略を選択して実装します。
成果物のドキュメンテーション: ドメインモデルやアーキテクチャ、設計パターンなど、プロジェクトの成果物に関するドキュメンテーションを整備することが重要です。これにより、チーム内での知識共有が容易になり、プロジェクトの継続性が向上します。
これらのポイントを遵守することで、ドメイン駆動設計プロジェクトは、スムーズかつ効果的に進行し、成功に導くことができます。チーム全体がDDDの概念や手法に精通し、継続的なコミュニケーションと協力を保ちながらプロジェクトを推進することが、最終的な成功の鍵となります。
6. ドメイン駆動設計とアーキテクチャ
ドメイン駆動設計 (DDD) は、ソフトウェア開発のアプローチであり、特定のアーキテクチャスタイルに依存していません。しかし、DDD は一部のアーキテクチャパターンと非常に相性が良く、その実践を容易にします。この章では、ヘキサゴナルアーキテクチャ、クリーンアーキテクチャ、およびマイクロサービスといったアーキテクチャパターンと DDD の関係について解説します。
6.1. ヘキサゴナルアーキテクチャ
ヘキサゴナルアーキテクチャ(ポート・アンド・アダプターズアーキテクチャとも呼ばれます)は、アプリケーションの内部と外部の関心事を明確に分離するアーキテクチャパターンです。このアーキテクチャは、アプリケーションのドメインロジックを中心に配置し、周囲にポートとアダプターを設けることで、外部システムとの連携や技術的詳細を疎結合に保ちます。
DDD とヘキサゴナルアーキテクチャは、ドメインロジックに焦点を当てる点で一致しています。境界付けられたコンテキストを用いることで、ヘキサゴナルアーキテクチャは DDD の概念を適切に表現できる柔軟性を提供します。
6.2. クリーンアーキテクチャ
クリーンアーキテクチャは、ソフトウェアの構造を明確にする目的で提案されたアーキテクチャパターンです。このアーキテクチャでは、アプリケーションの各要素が特定の責任を持ち、依存関係が内側から外側へ向かうように設計されています。
ドメイン駆動設計とクリーンアーキテクチャは、ドメインロジックを中心に据え、技術的な詳細を取り巻く構造を整理する点で相性が良いです。DDD の戦術的パターン(エンティティ、値オブジェクト、集約、リポジトリなど)は、クリーンアーキテクチャの各層に自然に適用されます。例えば、エンティティや値オブジェクトはドメイン層に配置され、リポジトリやドメインサービスはインフラストラクチャ層やアプリケーション層に配置されます。
クリーンアーキテクチャを用いることで、ドメイン駆動設計の原則に基づいて、様々な技術やフレームワークと疎結合に連携するソフトウェアを実現できます。これにより、アプリケーションの保守性や拡張性が向上し、プロジェクトの寿命が延びることが期待できます。
6.3. ドメイン駆動設計とマイクロサービス
マイクロサービスアーキテクチャは、大規模なアプリケーションを小さなサービスに分割して開発・運用するアプローチです。各サービスは独立してデプロイ・スケールでき、チーム間のコミュニケーションや開発速度の向上を目指します。
ドメイン駆動設計とマイクロサービスアーキテクチャは、互いに補完し合う関係にあります。DDD の境界付けられたコンテキストは、マイクロサービスの分割単位を決定する際の指針となります。一方で、マイクロサービスアーキテクチャは、DDD の戦略的設計を実現する上で有用なパターンを提供します。
具体的には、各マイクロサービスが独自のユビキタス言語とドメインモデルを持ち、他のサービスとの連携は API やイベントを介して行われます。これにより、各サービスのドメインロジックが明確に分離され、全体として疎結合なシステムが構築できます。
また、マイクロサービスアーキテクチャを採用することで、DDD の戦略的設計パターン(共有カーネル、カスタマーサプライヤー、アンチコルラプションレイヤなど)が実践しやすくなります。これらのパターンは、サービス間の依存関係を適切に管理し、ドメインの知識を共有する上で役立ちます。
これらのアーキテクチャパターンは、ドメインロジックを中心に据え、技術的な詳細や外部システムとの連携を疎結合に保つことを重視しています。その結果、アプリケーションの保守性や拡張性が向上し、チームの生産性が高まることが期待できます。
7. まとめ: ドメイン駆動設計の採用を検討する
このブログでは、ドメイン駆動設計(DDD)の基本概念や要素、戦術的・戦略的設計、アーキテクチャについて説明しました。DDDは、以下のようなプロジェクトに適しています。
複雑なドメインロジックを持つプロジェクト: DDDは、ビジネスルールやドメイン知識をコード上で表現しやすくすることを目指しています。そのため、複雑なビジネスロジックを持つプロジェクトには特に効果的です。
長期的なプロジェクト: DDDは、ソフトウェアの保守性や拡張性を向上させることを目指しています。長期にわたって開発や保守が行われるプロジェクトには、DDDのアプローチが有効です。
チームがビジネスエキスパートと緊密に協力するプロジェクト: DDDは、チームがビジネスエキスパートと共同でドメイン知識を明確化し、ソフトウェアに反映することを重視しています。このような協力が実現できるプロジェクトでは、DDDの効果が最大化されます。
総じて、ドメイン駆動設計は、複雑なドメインロジックを持つプロジェクトや長期的なプロジェクトにおいて、開発効率や保守性の向上に寄与するアプローチです。ただし、その導入には学習コストやドメイン知識の不足などの課題が伴います。これらの課題に対処しながら、適切なプロジェクトでDDDを採用することで、そのメリットを最大限に活かすことができるでしょう。
自動微分の概要とnumpyによる実装
1. はじめに
近年、機械学習、特に深層学習が急速に発展し、さまざまな分野でその効果が実証されています。深層学習は、人工ニューラルネットワークを用いて複雑な問題を解決するための手法であり、画像認識や自然言語処理などの分野で優れた成果を上げています。これらのアルゴリズムを効率的に実装するために、自動微分という技術が大変重要な役割を果たしています。
自動微分は、数学的な微分を自動で求めるためのアルゴリズムであり、機械学習の学習プロセスにおいて勾配を効率的に計算するために使用されます。自動微分の技術は、計算グラフという概念を用いて実装されることが一般的です。計算グラフは、関数を表現するグラフ構造であり、このグラフを用いて勾配計算の逆伝播を行うことができます。
本ブログでは、深層学習と自動微分の基本的な概念を解説し、計算グラフを利用した自動微分の仕組みを説明します。その後、Pythonのライブラリであるnumpyを用いて自動微分を実装する例を示し、実際のコードを通じて自動微分の理解を深めることを目指します。
2. 深層学習と自動微分の概要
2.1. 深層学習の基本
深層学習は、データから複雑なパターンや特徴を抽出し、予測や分類などのタスクを行うための機械学習手法です。多層のニューラルネットワークを用いて、階層的なデータ表現を学習します。学習は、主に教師あり学習と呼ばれる方法で行われ、学習データと目標出力(正解ラベル)を用いて、モデルの重みを調整します。
深層学習では、誤差逆伝播法(Backpropagation)と呼ばれるアルゴリズムが広く使われています。このアルゴリズムでは、モデルの出力と目標出力との誤差を計算し、その誤差を用いて各層の重みを更新します。重みの更新には、勾配降下法(Gradient Descent)やその改良版である確率的勾配降下法(Stochastic Gradient Descent, SGD)、Adamなどの最適化アルゴリズムが利用されます。これらのアルゴリズムでは、各重みに対する損失関数の勾配(偏微分)が求められることが前提となります。
2.2. 自動微分の必要性
深層学習モデルは、非常に複雑で多くのパラメータを持つことが一般的です。そのため、損失関数の勾配を手計算で求めることは困難です。自動微分は、この勾配計算を効率的に行うための技術です。自動微分を使えば、損失関数に対する各パラメータの勾配を自動的に計算できます。これにより、勾配降下法やその他の最適化アルゴリズムを用いた重みの更新が可能となります。
自動微分には主に二つのアプローチがあります。一つは順方向自動微分(Forward-mode Automatic Differentiation)、もう一つは逆方向自動微分(Reverse-mode Automatic Differentiation)です。深層学習では、逆方向自動微分がよく用いられます。これは、逆方向自動微分が、多数の入力変数に対する1つの出力変数の勾配を効率的に計算できるためです。逆方向自動微分では、計算グラフと呼ばれるデータ構造を用いて、関数の微分を効率的に計算します。逆方向自動微分の一般的な実装は、誤差逆伝播法(Backpropagation)であり、これを用いて深層学習モデルの勾配計算が行われます。
計算グラフは、計算過程をノードとエッジで表現したデータ構造です。ノードは、関数や変数を表し、エッジは、関数の入力と出力の関係を表します。逆伝播法では、損失関数の勾配を、計算グラフの出力ノードから入力ノードに向かって逆順に計算していきます。この過程で、チェインルール(連鎖律)を用いて、局所的な微分を計算し、それらを組み合わせることで、各パラメータに対する損失関数の勾配が求められます。
自動微分の利点は、勾配計算が効率的であり、数値微分に比べて高い精度を持つことです。また、解析的な微分を求めることが困難な場合でも、自動微分を用いることで勾配計算が可能となります。これにより、深層学習モデルの訓練が容易になり、さまざまな問題に対する高性能な解法が提供されています。
3. 計算グラフとは何か?
計算グラフは、数学的な計算をグラフ構造で表現したものです。複雑な計算を簡単なステップに分解し、各ステップをノードやエッジで表現します。これにより、関数の微分や最適化問題の解法をシステマティックに扱うことができます。計算グラフは、深層学習でニューラルネットワークの学習に用いられる勾配降下法や誤差逆伝播法(バックプロパゲーション)の基盤となっています。
3.1. 計算グラフの定義
計算グラフは、以下の要素で構成されています。
- ノード(Node): グラフ上の各点で、基本的な数学的演算(加算、乗算、指数関数など)を表現します。
- エッジ(Edge): ノード間の接続を示し、計算結果の値や勾配情報を伝播させる役割を持ちます。
計算グラフは、入力から出力に向かってデータを順方向に伝播させることで関数の計算を行い、逆方向に勾配情報を伝播させることで微分を効率的に計算します。
3.2. 計算グラフを使った逆伝播法
逆伝播法(バックプロパゲーション)は、計算グラフを使って微分を効率的に計算する手法です。この方法では、以下の2つのステップが繰り返されます。
順伝播(Forward Propagation): 入力から出力に向かってデータを伝播させ、各ノードで計算を行い、最終的な出力(損失関数の値)を得ます。
逆伝播(Backward Propagation): 出力から入力に向かって勾配情報を伝播させ、各ノードで局所的な微分を行い、最終的に入力に対する勾配を求めます。
逆伝播法の利点は、効率的な微分計算が可能であることです。これにより、深層学習では大量のパラメータを持つニューラルネットワークの学習が現実的な時間内に行えるようになりました。また、計算グラフはモジュラー性が高く、新しい演算や構造を容易に追加することができます。これにより、様々なニューラルネットワークアーキテクチャや活性化関数が実装できるようになりました。
計算グラフと逆伝播法を用いた深層学習のアルゴリズムは以下の手順で行われます。
- ニューラルネットワークのパラメータを初期化します。
- データセットから一部のデータを選び、入力としてニューラルネットワークに渡します。
- 順伝播を行い、各ノードで計算を行い、最終的な出力(損失関数の値)を得ます。
- 逆伝播を行い、各ノードで局所的な微分を行い、最終的に入力に対する勾配を求めます。
- 勾配降下法などの最適化アルゴリズムを使って、パラメータを更新します。
- ステップ2から5を繰り返し、損失関数の値が収束するまでパラメータを更新し続けます。
このように、計算グラフと逆伝播法を使って深層学習のアルゴリズムを効率的に実装することができます。計算グラフは、深層学習のフレームワーク(TensorFlowやPyTorchなど)の基盤となっており、研究者や開発者が新しいアイデアを迅速に試すことができるようになりました。
4. 自動微分の基本原理
自動微分は、微分の計算を効率的かつ正確に行うための手法です。この章では、自動微分の基本原理について説明します。
4.1. 数値微分と解析微分
微分には、数値微分と解析微分の2つの主要な手法があります。
数値微分
数値微分は、関数の値を用いて微分を近似的に求める方法です。一般に、中心差分法がよく使われます。中心差分法では、微小な幅hを用いて、以下のように微分を近似的に計算します。
f'(x) ≈ (f(x + h) - f(x - h)) / (2 * h)
しかし、数値微分には以下のような欠点があります。
- 計算誤差: hを小さくすると計算誤差が増大します。
- 計算量: 高次の微分を求めるには多くの計算が必要になります。
解析微分
解析微分は、関数の解析的な形式を用いて微分を厳密に求める方法です。例えば、多項式や三角関数などの基本的な関数の微分は、解析的に求めることができます。
解析微分は正確な値を得られるため、理想的な方法ですが、複雑な関数や多変数関数の微分を求めるのは難しい場合があります。
4.2. チェインルールと自動微分
自動微分は、解析微分の正確さと数値微分の汎用性を組み合わせた手法です。自動微分では、チェインルールを用いて微分を計算します。
チェインルールは、合成関数の微分を計算するための基本的なルールです。例えば、関数g(x) = f(h(x))が与えられた場合、チェインルールにより、次のようにg'(x)を求めることができます。
g'(x) = f'(h(x)) * h'(x)
自動微分では、計算グラフを使って逆伝播法により微分を効率的に計算します。計算グラフは、関数の計算過程をグラフ構造で表現したもので、各ノードが演算を、エッジが変数の値を表します。
自動微分を用いると、多変数関数や複雑な関数の微分も効率的に計算することができます。また、自動微分は、計算誤差が少なく、計算量も解析微分に比べて少ないため、深層学習などの機械学習アルゴリズムで幅広く利用されています。
次の章では、自動微分をnumpyを用いて実装する方法について説明します。
5. numpyを用いた自動微分の実装例
numpyで簡単な自動微分クラスを実装してみましょう。
5.1. 基本的な自動微分クラスの実装
まず、自動微分を行うための基本的なクラスを実装します。
import numpy as np class AutoDiff: def __init__(self, value, grad=None): self.value = value if grad is None: grad = np.ones_like(value) self.grad = grad def __repr__(self): return f"AutoDiff(value={self.value}, grad={self.grad})"
5.2. 演算子のオーバーロード
次に、基本的な算術演算子をオーバーロードして、自動微分をサポートするように拡張します。
class AutoDiff(AutoDiff): def __add__(self, other): if isinstance(other, AutoDiff): value = self.value + other.value grad = self.grad + other.grad else: value = self.value + other grad = self.grad return AutoDiff(value, grad) def __mul__(self, other): if isinstance(other, AutoDiff): value = self.value * other.value grad = self.grad * other.value + other.grad * self.value else: value = self.value * other grad = self.grad * other return AutoDiff(value, grad) # その他の演算子も同様にオーバーロード
5.3. 勾配計算の例
以下に、実装した自動微分クラスを用いて、簡単な関数の勾配を計算する例を示します。
# 関数 f(x, y) = x^2 + y^2 を定義 def f(x, y): return x * x + y * y # 入力変数をAutoDiffオブジェクトに変換 x = AutoDiff(2.0) y = AutoDiff(3.0) # 関数fをAutoDiffオブジェクトで評価 result = f(x, y) # 勾配を表示 print(result.grad) # [4.0, 6.0] (df/dx = 4, df/dy = 6)
6. まとめ
本記事では、深層学習において重要な役割を果たす自動微分について解説しました。計算グラフを用いた逆伝播法の説明を行い、自動微分の基本原理について触れました。また、numpyを用いた簡単な自動微分の実装例を示し、実際に勾配計算が行えることを確認しました。
自動微分は、深層学習における最適化アルゴリズムの効率向上に寄与するため、実用的な観点からも理解しておくべき重要な概念です。TensorFlowやPyTorchなどのモダンな深層学習フレームワークでは、自動微分機能を内蔵しており、効率的に勾配計算を行うことができます。
Pythonのabcライブラリ入門 - 抽象基底クラスを活用しよう
目次
- はじめに
- 抽象基底クラスの作成
- 抽象基底クラスを継承する具象クラスの実装
- 抽象基底クラスを活用した設計パターン
- abcライブラリと他のPython機能との連携
- 実践例:abcライブラリを使ったプロジェクト
- まとめ
1 はじめに
Pythonのabcライブラリは、抽象基底クラス(Abstract Base Class; ABC)をサポートするためのモジュールです。抽象基底クラスは、継承の際に一般的なインターフェースを提供することで、プログラムの構造を明確にし、コードの再利用性を向上させます。本章では、abcライブラリの概要と抽象基底クラスの目的について説明します。
1.1 abcライブラリの概要
Pythonのabcライブラリは、抽象基底クラスを定義するために必要な機能を提供します。これにより、Python開発者は継承の際に共通のインターフェースを定義し、派生クラスがそのインターフェースに従うことを強制できます。abcライブラリでは、ABCメタクラスと@abstractmethodデコレータが提供されており、これらを組み合わせて抽象基底クラスを作成できます。
1.2 抽象基底クラスの目的
抽象基底クラスは、オブジェクト指向プログラミングにおいて、以下の目的を達成するために使用されます。
インターフェースの明確化:抽象基底クラスを使用することで、継承されるクラスが持つべき共通のインターフェースを定義できます。これにより、クラス階層の構造が明確になり、開発者は一貫性のある方法でクラスを実装できます。
コードの再利用:共通の機能を抽象基底クラスに実装することで、継承されるすべてのクラスでその機能を再利用できます。これにより、コードの重複が減少し、メンテナンスが容易になります。
多態性のサポート:抽象基底クラスを使用すると、異なるクラスが共通のインターフェースを持つことができます。これにより、クラスに依存せず、共通のインターフェースを持つオブジェクトを操作できるようになります。
以上のように、Pythonのabcライブラリを使用することで、より堅牢で再利用可能なコードを書くことができます。次の章では、抽象基底クラスの作成方法について説明します。
て説明します。
2 抽象基底クラスの作成
抽象基底クラスを作成するには、abcライブラリのABCメタクラスと@abstractmethodデコレータを使用します。以下の手順で抽象基底クラスを定義できます。
2.1 ABC (Abstract Base Class) メタクラスの利用
ABCメタクラスを使用して、新しい抽象基底クラスを作成するには、abcモジュールをインポートし、クラス定義でABCメタクラスを継承します。
from abc import ABC class MyBaseClass(ABC): pass
2.2 @abstractmethod デコレータの活用
抽象メソッドを定義するには、@abstractmethodデコレータを使用します。これにより、そのメソッドを継承先の具象クラスでオーバーライドする必要があることを明示できます。@abstractmethodデコレータを使用するには、abcモジュールからインポートします。
from abc import ABC, abstractmethod class MyBaseClass(ABC): @abstractmethod def my_abstract_method(self): pass
2.3 抽象プロパティの宣言
抽象プロパティを定義する場合、@propertyデコレータと組み合わせて@abstractmethodデコレータを使用します。これにより、継承先の具象クラスでプロパティを実装する必要があることを示すことができます。
from abc import ABC, abstractmethod class MyBaseClass(ABC): @property @abstractmethod def my_abstract_property(self): pass
これで抽象基底クラスの作成方法について説明しました。次の章では、抽象基底クラスを継承する具象クラスの実装方法について説明します。
3 抽象基底クラスを継承する具象クラスの実装
抽象基底クラスを定義した後、具象クラスを作成して、その機能を実装します。具象クラスでは、抽象基底クラスで定義された抽象メソッドやプロパティをオーバーライドして、具体的な機能を提供します。
3.1 必要なメソッドのオーバーライド
具象クラスを作成する際には、抽象基底クラスで定義された抽象メソッドを必ずオーバーライドしなければなりません。オーバーライドしないと、具象クラスのインスタンス化時にエラーが発生します。以下は、抽象基底クラスを継承した具象クラスの例です。
from abc import ABC, abstractmethod class Animal(ABC): @abstractmethod def speak(self): pass class Dog(Animal): def speak(self): return "ワンワン"
3.2 オーバーライドの強制
abcライブラリを使って抽象基底クラスを作成することで、具象クラスが抽象メソッドをオーバーライドしない場合、インスタンス化時にエラーが発生します。これにより、継承先のクラスが必ず指定されたインターフェースを実装することが保証されます。
class Cat(Animal): pass # インスタンス化しようとするとエラーが発生 c = Cat() # TypeError: Can't instantiate abstract class Cat with abstract methods speak
3.3 継承による多態性
抽象基底クラスを利用することで、継承先のクラスが共通のインターフェースを持つことが保証されます。これにより、異なる具象クラスのインスタンスを同じように扱うことができるため、コードの再利用性や拡張性が向上します。以下は、継承による多態性の例です。
class Elephant(Animal): def speak(self): return "パオーン" animals = [Dog(), Cat(), Elephant()] for animal in animals: print(animal.speak()) # ワンワン、ニャーン、パオーン
この例では、Animal クラスを継承した Dog、Cat、Elephant クラスのインスタンスを同じリストに格納し、それぞれの speakメソッドを呼び出しています。これにより、異なる具象クラスのインスタンスを同じように扱うことができ、コードの可読性や保守性が向上します。また、新しい動物クラスを追加する際も、Animal クラスを継承し、speak メソッドをオーバーライドするだけで簡単に実装することができます。
例えば、新しく Fish クラスを追加する場合は以下のように実装できます。
class Fish(Animal): def speak(self): return "ブクブク" animals.append(Fish()) for animal in animals: print(animal.speak()) # ワンワン、ニャーン、パオーン、ブクブク
これで、Fish クラスも他の動物クラスと同様に扱うことができ、コードの拡張性が向上しました。
まとめると、抽象基底クラスを継承する具象クラスの実装では、以下の3つのポイントが重要です。
- 必要なメソッドのオーバーライド: 抽象基底クラスで定義された抽象メソッドを必ずオーバーライドします。
- オーバーライドの強制: abcライブラリを使うことで、抽象メソッドのオーバーライドを強制し、インターフェースの実装を保証します。
- 継承による多態性: 抽象基底クラスを利用することで、異なる具象クラスのインスタンスを同じように扱い、コードの再利用性や拡張性を向上させます。
4. 抽象基底クラスを活用した設計パターン
抽象基底クラスは、様々な設計パターンに活用することができます。この章では、特にテンプレートメソッドパターンとストラテジーパターンに焦点を当て、どのように抽象基底クラスを活用できるかを説明します。また、その他の設計パターンについても簡単に触れます。
4.1 テンプレートメソッドパターン
テンプレートメソッドパターンは、アルゴリズムの骨格を定義し、一部のステップをサブクラスで実装できるようにすることで、アルゴリズムの再利用とカスタマイズを容易にします。抽象基底クラスを使って、テンプレートメソッドを実装することができます。
例として、簡単なデータ変換プログラムを考えます。以下のような抽象基底クラスを作成できます。
from abc import ABC, abstractmethod class DataTransformer(ABC): def process_data(self, data): data = self.read_data(data) data = self.transform_data(data) self.write_data(data) @abstractmethod def read_data(self, data): pass @abstractmethod def transform_data(self, data): pass @abstractmethod def write_data(self, data): pass
この例では、process_dataメソッドがテンプレートメソッドです。このメソッドは、read_data、transform_data、write_dataの3つの抽象メソッドを順番に呼び出します。具象クラスは、これらの抽象メソッドを実装することで、データ変換の詳細をカスタマイズできます。
4.2 ストラテジーパターン
ストラテジーパターンは、アルゴリズムを定義したインターフェイスと、そのインターフェイスを実装した具象クラスのセットを作成することで、アルゴリズムの交換が容易になるように設計されています。抽象基底クラスは、ストラテジーパターンにおけるインターフェイスの役割を果たすことができます。
例として、様々なソートアルゴリズムを実装するストラテジーパターンを考えます。
from abc import ABC, abstractmethod class SortStrategy(ABC): @abstractmethod def sort(self, data): pass class BubbleSortStrategy(SortStrategy): def sort(self, data): n = len(data) for i in range(n): for j in range(0, n-i-1): if data[j] > data[j+1]: data[j], data[j+1] = data[j+1], data[j] return data class QuickSortStrategy(SortStrategy): def sort(self, data): if len(data) <= 1: return data pivot = data[len(data) // 2] left = [x for x in data if x < pivot] middle = [x for x in data if x == pivot] right = [x for x in data if x > pivot] return self.sort(left) + middle + self.sort(right) class SortContext: def __init__(self, strategy: SortStrategy): self.strategy = strategy def set_strategy(self, strategy: SortStrategy): self.strategy = strategy def execute_sort(self, data): return self.strategy.sort(data) data = [54, 26, 93, 17, 77, 31, 44, 55, 20] context = SortContext(BubbleSortStrategy()) print("Bubble Sort: ", context.execute_sort(data)) context.set_strategy(QuickSortStrategy()) print("Quick Sort: ", context.execute_sort(data))
このコード例では、SortStrategy 抽象基底クラスを使って、異なるソートアルゴリズムを実装するためのインターフェイスを定義しています。具象クラスである BubbleSortStrategy と QuickSortStrategy は、それぞれバブルソートとクイックソートのアルゴリズムを実装しています。
SortContext クラスは、実行時に選択されたソートストラテジーを使用してソートを実行します。このクラスは、execute_sort メソッドを介してソートを実行し、必要に応じて set_strategy メソッドでストラテジーを変更できます。
5. abcライブラリと他のPython機能との連携
abcライブラリは、他のPython機能と組み合わせることで、より強力なコード設計が可能になります。本章では、abcライブラリをイテレータやジェネレータ、コンテキストマネージャ、デコレータといった機能と組み合わせる方法を紹介します。
5.1 イテレータとジェネレータ
Pythonのイテレータは、要素を一つずつ取り出すことができるオブジェクトで、__iter__() メソッドと __next__() メソッドを実装しています。abcライブラリを使って、イテレータの抽象基底クラスを作成することができます。
from abc import ABC, abstractmethod class AbstractIterator(ABC): @abstractmethod def __iter__(self): pass @abstractmethod def __next__(self): pass
ジェネレータは、イテレータを簡単に実装できる機能で、yield文を使って要素を一つずつ生成します。ジェネレータ関数を抽象メソッドとして定義することができます。
from abc import ABC, abstractmethod class AbstractGenerator(ABC): @abstractmethod def generator_function(self): yield
5.2 コンテキストマネージャ
コンテキストマネージャは、with文を使ってリソースの確保と解放を行うためのオブジェクトです。__enter__()メソッドと__exit__()メソッドを実装しています。abcライブラリを使って、コンテキストマネージャの抽象基底クラスを作成することができます。
from abc import ABC, abstractmethod class AbstractContextManager(ABC): @abstractmethod def __enter__(self): pass @abstractmethod def __exit__(self, exc_type, exc_value, traceback): pass
5.3 デコレータ
デコレータは、関数やクラスの振る舞いを変更するための機能です。デコレータを使って、抽象メソッドの前後に処理を追加することができます。例えば、以下のコードは、メソッドの実行時間を計測するデコレータを実装しています。
import time from functools import wraps def timer_decorator(func): @wraps(func) def wrapper(*args, **kwargs): start_time = time.time() result = func(*args, **kwargs) end_time = time.time() print(f"{func.__name__} took {end_time - start_time:.2f} seconds to execute.") return result return wrapper
このデコレータを抽象基底クラスのメソッドに適用することで、具象クラスで実装されたメソッドの実行時間を計測することができます。
from abc import ABC, abstractmethod class AbstractTask(ABC): @timer_decorator @abstractmethod def perform_task(self): pass class ConcreteTask(AbstractTask): def perform_task(self): # Perform some time-consuming task time.sleep(2) task = ConcreteTask() task.perform_task()
この例では、AbstractTask クラスに perform_task という抽象メソッドが定義されており、timer_decorator が適用されています。具象クラス ConcreteTask でこのメソッドを実装すると、メソッドの実行時間が計測されます。
6 実践例:abcライブラリを使ったプロジェクト
この章では、実際にabcライブラリを使ってプロジェクトを開発する際の手順を、ケーススタディを通じて学びます。また、コード解説やベストプラクティスについても触れていきます。
6.1 ケーススタディ
シナリオ:あなたは、異なる種類のデータソース(CSV、JSON、XML)からデータを読み込み、それらを統一的に扱うためのPythonプロジェクトを開発しています。抽象基底クラスを用いて、各データソースのインターフェースを定義し、具象クラスで各データソースごとの処理を実装していくことにしました。
6.2 コード解説
まず、abcライブラリを使って抽象基底クラスを定義します。
from abc import ABC, abstractmethod import csv import json import xml.etree.ElementTree as ET class DataSource(ABC): @abstractmethod def read_data(self, file_path): pass @abstractmethod def process_data(self, data): pass
次に、具象クラスでCSV、JSON、XMLデータソースをそれぞれ実装します。
class CSVDataSource(DataSource): def read_data(self, file_path): with open(file_path, mode='r') as csvfile: reader = csv.DictReader(csvfile) data = [row for row in reader] return data def process_data(self, data): # ここでCSVデータの処理を行います。 pass class JSONDataSource(DataSource): def read_data(self, file_path): with open(file_path, mode='r') as jsonfile: data = json.load(jsonfile) return data def process_data(self, data): # ここでJSONデータの処理を行います。 pass class XMLDataSource(DataSource): def read_data(self, file_path): tree = ET.parse(file_path) root = tree.getroot() data = [elem.attrib for elem in root] return data def process_data(self, data): # ここでXMLデータの処理を行います。 pass
6.3 ベストプラクティス
抽象基底クラスに共通の処理を実装し、具象クラスで差分のみを実装することで、コードの重複を避けられます。例えば、ファイルの読み込み方法が共通であれば、抽象基底クラスに実装しておき、具象クラスではデータの処理方法のみを実装することができます。
抽象基底クラスを使用する際、インターフェースのみを定義し、実装は具象クラスに任せることが重要です。これにより、継承したクラスが親クラスのメソッドを必ずオーバーライドすることを保証できます。また、将来的に新しいデータソースが追加された場合でも、抽象基底クラスに対して変更を加えることなく、新しい具象クラスを追加することができます。
abcライブラリを使って定義した抽象基底クラスは、継承関係を明確にし、コードの可読性や保守性を向上させることができます。また、Pythonの多態性を活用することで、異なるデータソースに対して同じインターフェースでアクセスできるため、コードが柔軟になります。
抽象基底クラスを活用する際には、Pythonの他の機能(イテレータ、ジェネレータ、コンテキストマネージャ、デコレータなど)との組み合わせを考慮することで、さらに強力なコード設計が可能になります。
テストを行う際、抽象基底クラスを継承した具象クラスのテストを重点的に行い、網羅的にテストケースを作成することが重要です。抽象基底クラス自体には実装がないため、具象クラスでの実装が正しいかどうかを確認することで、全体の品質を向上させることができます。
このようなベストプラクティスを活用して、abcライブラリを使ったプロジェクトを効率的に開発し、品質の高いコードを実現できるでしょう。
7 まとめ
本記事では、Pythonのabcライブラリと抽象基底クラスについて紹介しました。抽象基底クラスを使用することで、クラスの設計と実装をより効果的に行うことができます。以下に、本記事で取り上げた主なポイントをまとめます。
- クラス階層の設計が明確になることで、コードの可読性とメンテナンス性が向上します。
- インターフェースの強制により、継承する具象クラスが一貫した振る舞いを持つことが保証されます。
- 設計パターンを適用することで、コードの再利用性と拡張性が向上します。
Reflexion:動的な記憶と自己反省を持つ自律的なLLMエージェント
論文 arxiv.org
実装 github.com
はじめに
自己反省をすることで、人間は試行錯誤を繰り返しながら、新しい問題を効率的に解決することができます。この研究ではLLMエージェントに動的な記憶(scratchpad)と自己反省能力(reflections)を付与し、既存の推論トレースとタスク固有の行動選択能力を強化するアプローチであるReflexionを提案しています。
また、完全自動化を実現するための、簡単かつ効果的なヒューリスティックを導入しています。このアプローチを評価するために、AlfWorld環境での意思決定タスクとHotPotQA環境での知識集約的な検索ベースの質問応答タスクにおけるエージェントの能力を評価しところ、それぞれ97%と51%の成功率を記録し従来の研究を圧倒しています。
概要
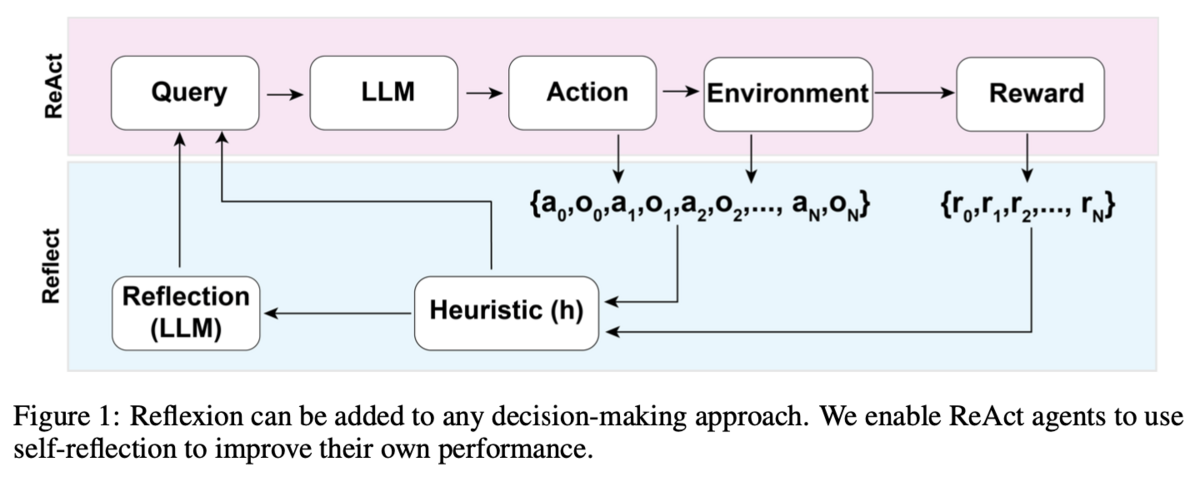
ReflexionはReActというフレームワークに自己反省機構(Reflect)を組み合わせた構造を取ります。ReActはLLMに推論と行動を繰り返し行わせ、タスクを実行させるためのフレームワークです。(詳しくは以下の参考文献を参照)
Reflexionは下図のようになっています。ReActでは、環境(Environment)に対して行動(Action)を行うと結果を観測(Observation)できます。また結果の良し悪しに応じて報酬(Reward)を設定することができます。
これらの行動、観測、報酬の履歴をヒューリスティック(Heuristic)に入力します。ヒューリスティックは平たく言えば、入力された履歴が反省するべき対象か判定するゲートのような役割を果たします。反省すべき場合というのは、得られた最終結果が所望のものと違う場合や、結果を得るまでに試行回数が多すぎる場合などです。
情報検索型QAシステムでの実例
データセット
ここではHotPotQAを解く例を扱います。 HotPotQAは、Wikipediaベースの質問と答えのペアを持つデータセットであり、質問応答(QA)システムの研究や評価に使用されています。このデータセットは、正確な回答を得るために複数のサポート文書を統合することが必要な質問を含んでいます。
エージェントの回答方法
エージェントはThought, Action, Observationの3段階のステップ織り交ぜながら、質問回答タスクを解くことを求められます。Thoughtは現在の状況を踏まえて次に取るべき行動を推論します。この推論に基づいてActionで行動を取ります。Observationでは環境に対するActionの結果を取得します。
またActionには具体的に3種類の行動が存在します。
- Search[entity]:Wikipediaで正確なentityを検索し、存在すれば最初のパラグラフを返す。存在しない場合は、検索するためにいくつかの類似のentityを返す
- Lookup[keyword]:Searchで見つかった最後の文章に含まれるkeywordを含む次の文章を返す
- Finish[answer]:answerを返し、タスクを終了させる
react_reflect_agent_prompt
Solve a question answering task with interleaving Thought, Action, Observation steps. Thought can reason about the current situation, and Action can be three types:
(1) Search[entity], which searches the exact entity on Wikipedia and returns the first paragraph if it exists. If not, it will return some similar entities to search.
(2) Lookup[keyword], which returns the next sentence containing keyword in the last passage successfully found by Search.
(3) Finish[answer], which returns the answer and finishes the task.
You may take as many steps as necessary.
Here are some examples:
{examples}
(END OF EXAMPLES)
{reflections}
Question: {question}{scratchpad}
このプロンプトには以下の変数が埋め込まれています。
examples:Think→Act→Observeの一連の流れの例示。内容は本記事下部に掲載してありますreflections:前回の試行から得られた反省結果。反省結果は以下のreflect_promptを使って得られるquestion:現在与えられている問いscratchpad:現在までのThink→Act→Observe過程の記録
ThinkとActは共にprompt_agent()というメソッドが担当します。
# Think self.scratchpad += f'\nThought {self.step_n}:' self.scratchpad += ' ' + self.prompt_agent() # Act self.scratchpad += f'\nAction {self.step_n}:' action = self.prompt_agent() self.scratchpad += ' ' + action action_type, argument = parse_action(action)
prompt_agent()の中身は以下のようになっています。_build_agent_prompt()にてexamples reflections question scratchpadを与えたプロンプトを生成し、LLMを駆動します。ここでreflectionsに有用な情報が含まれていれば質の高いThinkが可能になるということですね。
def prompt_agent(self) -> str: return format_step(self.llm(self._build_agent_prompt())) ... def _build_agent_prompt(self) -> str: return self.agent_prompt.format( examples = self.react_examples, reflections = format_reflections(self.reflections), question = self.question, scratchpad = self.scratchpad)
reflectionsを生成するプロンプトは以下の通りです。
examples:反省方法の例示。内容は本記事下部に掲載してありますquestion:前回与えられていた問いscratchpad:前回の試行におけるThink→Act→Observe過程の記録
reflect_prompt
You are an advanced reasoning agent that can improve based on self refection. You will be given a previous reasoning trial in which you were given access to an Docstore API environment and a question to answer. You were unsuccessful in answering the question either because you guessed the wrong answer with Finish[<answer>], or you used up your set number of reasoning steps. In a few sentences, Diagnose a possible reason for failure and devise a new, concise, high level plan that aims to mitigate the same failure. Use complete sentences.
Here are some examples:
{examples}
Previous trial:
Question: {question}{scratchpad}
Reflection:
エージェントの回答例
Question
Jaclyn Stapp is married to the former frontman of a band that disbanded in what year?
Answer
2004
Result
Question: Jaclyn Stapp is married to the former frontman of a band that disbanded in what year? Thought 1: I need to search Jaclyn Stapp and the former frontman of a band, find the year the band disbanded, then find the answer. Action 1: Search[Jaclyn Stapp] Observation 1: Jaclyn Nesheiwat Stapp (born July 29, 1980) is a beauty queen, author, philanthropist, actress, and fashion model with pageant roots in Florida and New York. She is married to Scott Stapp, the voice of the band Creed and current solo touring artist. Her most notable titles include Mrs. Florida America 2008, Miss New York USA 2004, and First Runner-Up for Mrs. World 2022. In 2010 she wrote a children's book, Wacky Jacky: The True Story of an Unlikely Beauty Queen. She is executive director of The Scott Stapp With Arms Wide Open Foundation, and founder of CHARM (Children Are Magical) by Jaclyn Stapp, which was formed to raise awareness of issues with which children deal and to provide underprivileged youth help with education. Thought 2: Jaclyn Stapp is married to Scott Stapp, the voice of the band Creed. I need to search Creed and find the year the band disbanded. Action 2: Search[Creed] Observation 2: A creed, also known as a confession of faith, a symbol, or a statement of faith, is a statement of the shared beliefs of a community (often a religious community) in a form which is structured by subjects which summarize its core tenets. The earliest known creed in Christianity, "Jesus is Lord", originated in the writings of Paul the Apostle. One of the most widely used Christian creeds is the Nicene Creed, first formulated in AD 325 at the First Council of Nicaea. It was based on Christian understanding of the canonical gospels, the letters of the New Testament and, to a lesser extent, the Old Testament. Affirmation of this creed, which describes the Trinity, is generally taken as a fundamental test of orthodoxy for most Christian denominations, and was historically purposed against Arianism. A shorter version of the creed, called the Apostles' Creed, is nowadays the most used version in Christian services. Some Christian denominations do not use any of those creeds. Although some say Judaism is non-creedal in nature, others say it recognizes a single creed, the Shema Yisrael, which begins: "Hear, O Israel: the LORD our God, the LORD is one."In Islamic theology, the term most closely corresponding to "creed" is ʿaqīdah (عقيدة). Thought 3: Creed is not the band I am looking for. I need to search Creed (band) instead. Action 3: Search[Creed (band)] Observation 3: Creed was an American rock band from Tallahassee, Florida. Active from 1994 to 2004, and then from 2009 to 2012, Creed was prominent in the post-grunge movement of the mid-1990s. The band released three consecutive multi-platinum albums, with their album Human Clay being certified diamond. Creed has sold over 28 million records in the United States, has sold over 53 million albums worldwide, and was the ninth best-selling artist of the first decade of the 2000s. However, Creed has been panned by some critics and listeners; readers of Rolling Stone magazine ranked the band the worst artist of the 1990s.For most of its existence, the band consisted of lead vocalist Scott Stapp, guitarist and vocalist Mark Tremonti, bassist Brian Marshall, and drummer Scott Phillips. Creed released two studio albums, My Own Prison in 1997 and Human Clay in 1999, before Marshall left the band in 2000. The band's third album, Weathered, was released in 2001, with Tremonti on bass guitar. Creed disbanded in 2004; Stapp pursued a solo career while Tremonti, Marshall, and Phillips founded the band Alter Bridge with Myles Kennedy. In 2009, Creed reunited for a fourth album, Full Circle, then toured until 2012. Since then, Creed has been on hiatus while the instrumental members have remained active with Alter Bridge; Stapp has continued his solo career and joined the band Art of Anarchy in 2016. Tremonti also formed his own band, Tremonti, in 2011. Thought 4: Creed disbanded in 2004, so the answer is 2004. Action 4: Finish[2004] Observation 4: Answer is CORRECT Correct answer: 2004
日本語訳
質問です: Jaclyn Stappは、何年に解散したバンドの元フロントマンと結婚している? 思考1:Jaclyn Stappとあるバンドの元フロントマンを検索して、そのバンドが解散した年を見つけ、それから答えを見つける必要がある。 行動1:[Jaclyn Stapp]を検索する。 観察1:Jaclyn Nesheiwat Stapp(1980年7月29日生まれ)は、フロリダとニューヨークのページェントをルーツとする美の女王、作家、慈善事業家、女優、ファッションモデル。バンド「クリード」の声優であり、現在はソロでツアーを行っているスコット・スタップと結婚している。 主な肩書きは、ミセス・フロリダ・アメリカ2008、ミス・ニューヨークUSA2004、ミセス・ワールド2022のファースト・ランナー・アップなど。2010年には児童書「Wacky Jacky: The True Story of an Unlikely Beauty Queen」を執筆した。 スコット・スタップ・ウィズ・アームズ・ワイド・オープン財団のエグゼクティブ・ディレクターであり、子供たちが抱える問題への意識を高め、恵まれない若者たちに教育支援を行うために結成されたCHARM(Children Are Magical)by Jaclyn Stappの創設者である。 思考2:Jaclyn Stappは、バンドCreedの声優であるScott Stappと結婚しています。クリードを検索して、バンドが解散した年を調べる必要がある。 行動2:[Creed]を検索する 観察2:信条とは、信仰告白、シンボル、信仰声明とも呼ばれ、ある共同体(多くは宗教共同体)が共有する信念を、その中核となる信条を要約した主題によって構成された形式で述べたものである。 キリスト教で最も古くから知られている信条は、「イエスは主である」というもので、使徒パウロの著作に由来しています。最も広く使われているキリスト教の信条は、AD325年の第1回ニカイア公会議で初めて制定された「ニカイア信条」である。この信条は、新約聖書の正典である福音書、手紙、および旧約聖書に対するキリスト教の理解に基づいている。三位一体について述べたこの信条を支持することは、一般に、ほとんどのキリスト教の教派にとって正統性の基本的なテストとされており、歴史的にアリウス主義に対する目的であった。この信条を短くしたものが「使徒信条」と呼ばれ、現在ではキリスト教の礼拝で最も多く使われています。 キリスト教の教派によっては、これらの信条を用いないものもある。 ユダヤ教はもともと信条を持たないという説もあるが、シェマ・イースレエルという一つの信条を認めているという説もある: 「イスラム神学では、「信条」に最も近い用語はʾaqīdah (عقيدة) である。 思考3:Creedは私が探しているバンドではありません。代わりにCreed (band)を検索する必要があります。 行動3:[Creed (band)]を検索する。 観察3:Creedは、フロリダ州タラハシー出身のアメリカのロックバンドである。1994年から2004年まで、そして2009年から2012年まで活動したクリードは、1990年代半ばのポスト・グランジ・ムーブメントにおいて著名な存在であった。バンドは3枚連続でマルチプラチナアルバムをリリースし、アルバム『Human Clay』はダイヤモンドに認定されました。クリードは米国で2800万枚以上のレコードを売り上げ、全世界で5300万枚以上のアルバムを売り上げ、2000年代の最初の10年間で9番目に売れたアーティストとなった。しかし、クリードは一部の批評家やリスナーから非難されている。ローリングストーン誌の読者は、バンドを1990年代の最悪のアーティストにランク付けした。バンドはその存在のほとんどで、リードボーカリストのスコット・スタップ、ギターとボーカルのマーク・トレモンティ、ベースのブライアン・マーシャル、ドラマーのスコット・フィリップスの4人で構成されている。クリードは1997年に『My Own Prison』、1999年に『Human Clay』という2枚のスタジオアルバムをリリースし、2000年にマーシャルがバンドを脱退した。2001年、トレモンティがベースを担当する3枚目のアルバム『Weathered』を発表。スタップはソロ活動を行い、トレモンティ、マーシャル、フィリップスはマイルス・ケネディと共にバンド「オルター・ブリッジ」を結成した後、2004年にクリードは解散した。 2009年、クリードは4枚目のアルバム『Full Circle』のために再結成し、2012年までツアーを行った。それ以降、Creedは活動休止しているが、楽器隊のメンバーはAlter Bridgeで活動を続けている。スタップはソロ活動を続け、2016年にバンドArt of Anarchyに加入した。また、トレモンティは2011年に自身のバンド「Tremonti」を結成している。 思考4:Creedは2004年に解散しているので、答えは2004年です。 行動4:フィニッシュ[2004]。 観察4:答えは「CORRECT」です。 正解:2004年
「Creed」という単語で検索してしまい一般名詞の説明が返ってきた結果を踏まえて、「Creed(band)」という検索に修正しているのが印象的です。
プロンプトに埋め込まれるexamples
react_reflect_agent_promptのexamples
Question: What is the elevation range for the area that the eastern sector of the Colorado orogeny extends into? Thought 1: I need to search Colorado orogeny, find the area that the eastern sector of the Colorado orogeny extends into, then find the elevation range of the area. Action 1: Search[Colorado orogeny] Observation 1: The Colorado orogeny was an episode of mountain building (an orogeny) in Colorado and surrounding areas. Thought 2: It does not mention the eastern sector. So I need to look up eastern sector. Action 2: Lookup[eastern sector] Observation 2: (Result 1 / 1) The eastern sector extends into the High Plains and is called the Central Plains orogeny. Thought 3: The eastern sector of Colorado orogeny extends into the High Plains. So I need to search High Plains and find its elevation range. Action 3: Search[High Plains] Observation 3: High Plains refers to one of two distinct land regions: Thought 4: I need to instead search High Plains (United States). Action 4: Search[High Plains (United States)] Observation 4: The High Plains are a subregion of the Great Plains. From east to west, the High Plains rise in elevation from around 1,800 to 7,000 ft (550 to 2,130 m).[3] Thought 5: High Plains rise in elevation from around 1,800 to 7,000 ft, so the answer is 1,800 to 7,000 ft. Action 5: Finish[1,800 to 7,000 ft] Question: Musician and satirist Allie Goertz wrote a song about the "The Simpsons" character Milhouse, who Matt Groening named after who? Thought 1: The question simplifies to "The Simpsons" character Milhouse is named after who. I only need to search Milhouse and find who it is named after. Action 1: Search[Milhouse] Observation 1: Milhouse Mussolini Van Houten is a recurring character in the Fox animated television series The Simpsons voiced by Pamela Hayden and created by Matt Groening. Thought 2: The paragraph does not tell who Milhouse is named after, maybe I can look up "named after". Action 2: Lookup[named after] Observation 2: (Result 1 / 1) Milhouse was named after U.S. president Richard Nixon, whose middle name was Milhous. Thought 3: Milhouse was named after U.S. president Richard Nixon, so the answer is Richard Nixon. Action 3: Finish[Richard Nixon] Question: Which documentary is about Finnish rock groups, Adam Clayton Powell or The Saimaa Gesture? Thought 1: I need to search Adam Clayton Powell and The Saimaa Gesture, and find which documentary is about Finnish rock groups. Action 1: Search[Adam Clayton Powell] Observation 1: Could not find [Adam Clayton Powell]. Similar: ['Adam Clayton Powell III', 'Seventh Avenue (Manhattan)', 'Adam Clayton Powell Jr. State Office Building', 'Isabel Washington Powell', 'Adam Powell', 'Adam Clayton Powell (film)', 'Giancarlo Esposito']. Thought 2: To find the documentary, I can search Adam Clayton Powell (film). Action 2: Search[Adam Clayton Powell (film)] Observation 2: Adam Clayton Powell is a 1989 American documentary film directed by Richard Kilberg. The film is about the rise and fall of influential African-American politician Adam Clayton Powell Jr.[3][4] It was later aired as part of the PBS series The American Experience. Thought 3: Adam Clayton Powell (film) is a documentary about an African-American politician, not Finnish rock groups. So the documentary about Finnish rock groups must instead be The Saimaa Gesture. Action 3: Finish[The Saimaa Gesture] Question: What profession does Nicholas Ray and Elia Kazan have in common? Thought 1: I need to search Nicholas Ray and Elia Kazan, find their professions, then find the profession they have in common. Action 1: Search[Nicholas Ray] Observation 1: Nicholas Ray (born Raymond Nicholas Kienzle Jr., August 7, 1911 – June 16, 1979) was an American film director, screenwriter, and actor best known for the 1955 film Rebel Without a Cause. Thought 2: Professions of Nicholas Ray are director, screenwriter, and actor. I need to search Elia Kazan next and find his professions. Action 2: Search[Elia Kazan] Observation 2: Elia Kazan was an American film and theatre director, producer, screenwriter and actor. Thought 3: Professions of Elia Kazan are director, producer, screenwriter, and actor. So profession Nicholas Ray and Elia Kazan have in common is director, screenwriter, and actor. Action 3: Finish[director, screenwriter, actor] Question: Which magazine was started first Arthur's Magazine or First for Women? Thought 1: I need to search Arthur's Magazine and First for Women, and find which was started first. Action 1: Search[Arthur's Magazine] Observation 1: Arthur's Magazine (1844-1846) was an American literary periodical published in Philadelphia in the 19th century. Thought 2: Arthur's Magazine was started in 1844. I need to search First for Women next. Action 2: Search[First for Women] Observation 2: First for Women is a woman's magazine published by Bauer Media Group in the USA.[1] The magazine was started in 1989. Thought 3: First for Women was started in 1989. 1844 (Arthur's Magazine) < 1989 (First for Women), so Arthur's Magazine was started first. Action 3: Finish[Arthur's Magazine] Question: Were Pavel Urysohn and Leonid Levin known for the same type of work? Thought 1: I need to search Pavel Urysohn and Leonid Levin, find their types of work, then find if they are the same. Action 1: Search[Pavel Urysohn] Observation 1: Pavel Samuilovich Urysohn (February 3, 1898 â August 17, 1924) was a Soviet mathematician who is best known for his contributions in dimension theory. Thought 2: Pavel Urysohn is a mathematician. I need to search Leonid Levin next and find its type of work. Action 2: Search[Leonid Levin] Observation 2: Leonid Anatolievich Levin is a Soviet-American mathematician and computer scientist. Thought 3: Leonid Levin is a mathematician and computer scientist. So Pavel Urysohn and Leonid Levin have the same type of work. Action 3: Finish[yes]
reflect_promptのexamples
Previous Trial: Question: The Rome Protocols were signed by three Prime Ministers one of which was assassinated as part of what? Thought 1: I need to search Rome Protocols, find the three Prime Ministers, then find what they were assassinated as part of. Action 1: Search[Rome Protocols] Observation 1: The Rome Protocols were a series of three international agreements concluded in Rome on 17 March 1934 between the governments of Austria, Hungary and Italy. They were signed by Italian Prime Minister Benito Mussolini, Austrian Chancellor Engelbert Dollfuss and Hungarian Prime Minister Gyula Gömbös. All of the protocols went into effect on 12 July 1934 and were registered in League of Nations Treaty Series on 12 December 1934. Thought 2: The three Prime Ministers were Benito Mussolini, Engelbert Dollfuss, and Gyula Gömbös. I need to search Benito Mussolini and find what he was assassinated as part of. Action 2: Search[Benito Mussolini] Observation 2: Benito Amilcare Andrea Mussolini (UK: MU(U)SS-ə-LEE-nee, US: MOOSS-, Italian: [beˈniːto aˈmilkare anˈdrɛːa mussoˈliːni]; 29 July 1883 – 28 April 1945) was an Italian politician and journalist who founded and led the National Fascist Party (PNF). He was Prime Minister of Italy from the March on Rome in 1922 until his deposition in 1943, as well as "Duce" of Italian fascism from the establishment of the Italian Fasces of Combat in 1919 until his summary execution in 1945 by Italian partisans. As dictator of Italy and principal founder of fascism, Mussolini inspired and supported the international spread of fascist movements during the inter-war period.Mussolini was originally a socialist politician and a journalist at the Avanti! newspaper. In 1912, he became a member of the National Directorate of the Italian Socialist Party (PSI), but he was expelled from the PSI for advocating military intervention in World War I, in opposition to the party's stance on neutrality. In 1914, Mussolini founded a new journal, Il Popolo d'Italia, and served in the Royal Italian Army during the war until he was wounded and discharged in 1917. Mussolini denounced the PSI, his views now centering on Italian nationalism instead of socialism, and later founded the fascist movement which came to oppose egalitarianism and class conflict, instead advocating "revolutionary nationalism" transcending class lines. On 31 October 1922, following the March on Rome (28–30 October), Mussolini was appointed prime minister by King Victor Emmanuel III, becoming the youngest individual to hold the office up to that time. After removing all political opposition through his secret police and outlawing labor strikes, Mussolini and his followers consolidated power through a series of laws that transformed the nation into a one-party dictatorship. Within five years, Mussolini had established dictatorial authority by both legal and illegal means and aspired to create a totalitarian state. In 1929, Mussolini signed the Lateran Treaty with the Holy See to establish Vatican City. Mussolini's foreign policy aimed to restore the ancient grandeur of the Roman Empire by expanding Italian colonial possessions and the fascist sphere of influence. In the 1920s, he ordered the Pacification of Libya, instructed the bombing of Corfu over an incident with Greece, established a protectorate over Albania, and incorporated the city of Fiume into the Italian state via agreements with Yugoslavia. In 1936, Ethiopia was conquered following the Second Italo-Ethiopian War and merged into Italian East Africa (AOI) with Eritrea and Somalia. In 1939, Italian forces annexed Albania. Between 1936 and 1939, Mussolini ordered the successful Italian military intervention in Spain in favor of Francisco Franco during the Spanish Civil War. Mussolini's Italy initially tried to avoid the outbreak of a second global war, sending troops at the Brenner Pass to delay Anschluss and taking part in the Stresa Front, the Lytton Report, the Treaty of Lausanne, the Four-Power Pact and the Munich Agreement. However, Italy then alienated itself from Britain and France by aligning with Germany and Japan. Germany invaded Poland on 1 September 1939, resulting in declarations of war by France and the UK and the start of World War II. On 10 June 1940, Mussolini decided to enter the war on the Axis side. Despite initial success, the subsequent Axis collapse on multiple fronts and eventual Allied invasion of Sicily made Mussolini lose the support of the population and members of the Fascist Party. As a consequence, early on 25 July 1943, the Grand Council of Fascism passed a motion of no confidence in Mussolini; later that day King Victor Emmanuel III dismissed him as head of government and had him placed in custody, appointing Pietro Badoglio to succeed him as Prime Minister. After the king agreed to an armistice with the Allies, on 12 September 1943 Mussolini was rescued from captivity in the Gran Sasso raid by German paratroopers and Waffen-SS commandos led by Major Otto-Harald Mors. Adolf Hitler, after meeting with the rescued former dictator, then put Mussolini in charge of a puppet regime in northern Italy, the Italian Social Republic (Italian: Repubblica Sociale Italiana, RSI), informally known as the Salò Republic, causing a civil war. In late April 1945, in the wake of near total defeat, Mussolini and his mistress Clara Petacci attempted to flee to Switzerland, but both were captured by Italian communist partisans and summarily executed by firing squad on 28 April 1945 near Lake Como. The bodies of Mussolini and his mistress were then taken to Milan, where they were hung upside down at a service station to publicly confirm their demise. Thought 3: Benito Mussolini was assassinated as part of the collapse of the Axis powers during World War II. So the Rome Protocols were signed by three Prime Ministers one of which was assassinated as part of World War II. Action 3: Finish[World War II] Reflection: I searched one of the prime ministers involved in the signing, then attemted to answer right away. I should have searched each of the prime ministers, then looked up 'death' on each of their pages in order to get more information before answering. Previous Trial: Question: Kam Heskin plays Paige Morgan in a 2004 film directed by who? Thought 1: I need to search Kam Heskin and Paige Morgan, find the 2004 film they are in, then find the director of the film. Action 1: Search[Kam Heskin] Observation 1: Kam Erika Heskin (born May 8, 1973) is an American actress. She began her career playing Caitlin Deschanel on the NBC daytime soap opera Sunset Beach (1998–1999), before appearing in films Planet of the Apes (2001) and Catch Me If You Can (2002). Heskin went on in 2003 to play Elizabeth Bennet in an independent film Pride & Prejudice: A Latter-Day Comedy, Robin in Charmed (2004), and Paige Morgan in The Prince and Me film franchise (2006–2010). Thought 2: Kam Heskin plays Paige Morgan in The Prince and Me film franchise. I need to search The Prince and Me film franchise and find the director of the 2004 film. Action 2: Search[The Prince and Me film franchise] Observation 2: Could not find [The Prince and Me film franchise]. Similar: ['Kam Heskin', 'Prince of Persia', 'Harry Potter and the Half-Blood Prince (film)', 'Prince of Persia: The Sands of Time (film)', 'The Chronicles of Narnia (film series)', 'Majestic Prince (franchise)', 'Kingsman (franchise)', 'The Little Prince (2015 film)', 'Shrek (franchise)', 'Harry Potter (film series)'] Thought 3: I need to search The Prince and Me (2004 film) instead. Action 3: Search[The Prince and Me (2004 film)] Observation 3: Could not find [The Prince and Me (2004 film)]. Similar: ['The Prince & Me', 'The Prince & Me 2: The Royal Wedding', 'Kam Heskin', 'Prince of Darkness (film)', 'Prince of Persia: The Sands of Time (film)', 'Rob Knox', 'Alexander (2004 film)', 'Prince of Persia', 'Brooklynn Prince', 'Prince (musician)'] Thought 4: I need to search The Prince & Me (2004 film). Action 4: Search[The Prince & Me (2004 film)] Observation 4: Could not find [The Prince & Me (2004 film)]. Similar: ['The Prince & Me', 'The Prince & Me 2: The Royal Wedding', 'Prince of Darkness (film)', 'Prince of Persia: The Sands of Time (film)', 'Rob Knox', 'Alexander (2004 film)', 'Prince (musician)', 'Prince of Persia', 'Kam Heskin', 'Brooklynn Prince'] Thought 5: I need to search The Prince & Me (2004 film) instead. Action 5: Search[The Prince & Me (2004 film)] Observation 5: Could not find [The Prince & Me (2004 film)]. Similar: ['The Prince & Me', 'The Prince & Me 2: The Royal Wedding', 'Prince of Darkness (film)', 'Prince of Persia: The Sands of Time (film)', 'Rob Knox', 'Alexander (2004 film)', 'Prince (musician)', 'Prince of Persia', 'Kam Heskin', 'Brooklynn Prince'] Thought 6: I need to search The Prince & Me (2004 film). Action 6: Search[The Prince & Me (2004 film)] Observation 6: Could not find [The Prince & Me (2004 film)]. Similar: ['The Prince & Me', 'The Prince & Me 2: The Royal Wedding', 'Prince of Darkness (film)', 'Prince of Persia: The Sands of Time (film)', 'Rob Knox', 'Alexander (2004 film)', 'Prince (musician)', 'Prince of Persia', 'Kam Heskin', 'Brooklynn Prince'] Reflection: I got stuck in a loop where I kept trying to search 'The Prince & Me (2004 film)' but the page could not be found. Instead I should have tried to search the similar results that had a similar name to see and they were made in 2004.
情報幾何学の概要
情報幾何を体系的に理解するためにまず全体像をおおまかにまとめてみます。個別のトピックに関しての記事を随時追加していくつもりです。
1. はじめに
1.1. 情報幾何学とは
情報幾何学は、確率分布や確率モデルの空間における幾何学的構造を研究する学問分野です。情報理論と微分幾何学を組み合わせたものであり、データ解析、機械学習、信号処理など幅広い分野に応用されています。
1.2. 歴史と発展
情報幾何学は、20世紀中頃に確率分布の尺度不変な距離を考えることから始まりました。その後、C. R. Raoがフィッシャー情報行列を導入し、確率分布間の距離の幾何学的構造を研究しました。1980年代には、Amari Shunichiらが情報幾何学の理論を発展させ、現代の情報幾何学が形成されました。
1.3. 主要な応用分野
情報幾何学は様々な分野に応用されています。主な応用分野は以下の通りです。
- 機械学習: 情報幾何学的アプローチは、機械学習アルゴリズムの設計や、深層学習の理解に役立っています。
- 信号処理: 情報幾何学は、信号処理における最適フィルタ設計や、盲目信号分離などにも応用されています。
- データ分析: データの可視化や、クラスタリング、次元削減などのデータ解析手法に情報幾何学が利用されています。
- 最適化アルゴリズム: 情報幾何学は、最適化問題においても効率的なアルゴリズムの開発に役立っています。
このように、情報幾何学は多くの分野で活用されており、今後の発展が期待されています。
2. 基本概念
2.1. 確率分布
情報幾何学は、確率分布の空間を幾何学的に解析するための理論です。確率分布は、ある事象が起こる確率を表現するもので、離散的な場合は確率質量関数、連続的な場合は確率密度関数で表されます。
2.2. 情報距離
情報距離は、2つの確率分布の類似性を測る指標です。情報幾何学では、情報距離を幾何学的な距離として扱い、確率分布間の距離を求めることができます。一般的な情報距離には、カルバック・ライブラー・ダイバージェンスなどがあります。
2.3. リーマン幾何学
リーマン幾何学は、曲がった空間での幾何学的な性質を扱う分野です。情報幾何学では、確率分布の空間をリーマン多様体としてモデル化し、その上での距離や曲率を研究します。
2.4. ダイバージェンス
ダイバージェンスは、2つの確率分布間の相違度を表す指標で、情報距離の一種です。カルバック・ライブラー・ダイバージェンスは、ダイバージェンスの代表的な例であり、情報幾何学で広く使われます。
2.5. フィッシャー情報行列
フィッシャー情報行列は、確率分布のパラメータの微小変化に対する情報量を表す行列です。情報幾何学では、フィッシャー情報行列をリーマン多様体のメトリックテンソルとして利用し、確率分布間の幾何学的な距離を計算します。
2.6. 確率分布の多様体
確率分布の多様体は、確率分布の集合をリーマン多様体として表現した空間です。この空間では、確率分布間の距離や角度、曲率などの幾何学的な性質が扱われ、情報幾何学の基本となる理論が構築されています。空間を適切に設計することで、機械学習や信号処理などの応用分野において効率的なアルゴリズムや手法が開発されています。
3. 情報幾何学の理論
3.1. 平均情報幾何
平均情報幾何は、確率分布の平均を取る際に情報幾何学の概念を利用する手法です。具体的には、情報距離を最小化するような分布の平均を求めることが目的となります。
ここで、は情報距離(ダイバージェンス)を表し、
は重み付け係数です。これにより、情報幾何学的な視点から最適な平均分布を求めることができます。
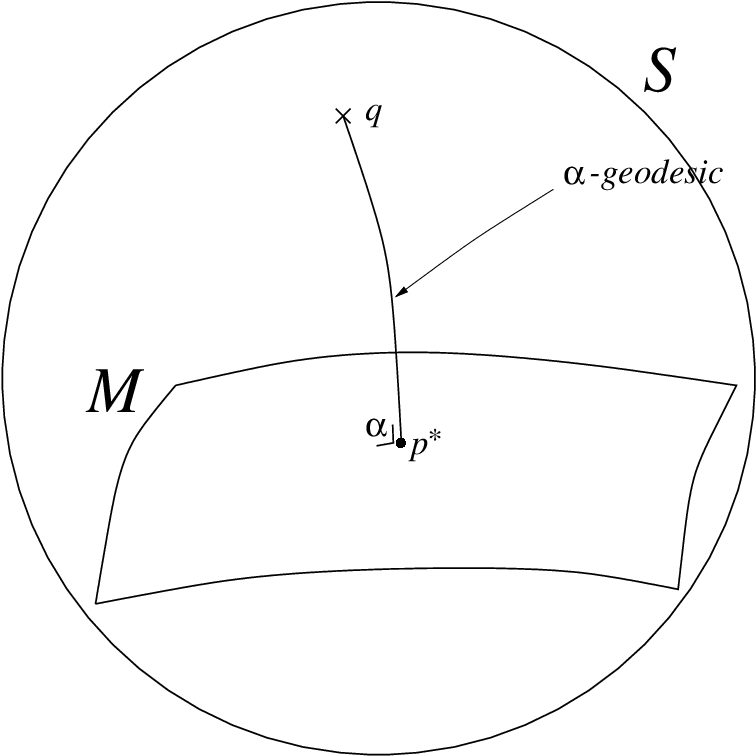
3.2. 情報射影と最尤推定
情報射影は、ある分布から別の分布への射影を情報幾何学の観点で表現したものです。具体的には、情報距離を最小化するような射影先の分布を求めます。情報射影は、最尤推定と密接な関係があります。最尤推定では、観測データに基づいてパラメータを推定する際に、尤度関数を最大化するパラメータを探します。情報射影の考え方を適用することで、最尤推定が情報幾何学的に解釈できます。
3.3. 情報空間の曲率
情報空間の曲率は、情報幾何学の重要な概念です。情報空間における曲率は、フィッシャー情報行列を用いて計算されます。この曲率は、情報幾何学における最適化問題やデータ解析において重要な役割を果たします。
3.4. 双対空間と共役座標
情報幾何学では、双対空間と共役座標を用いて情報空間の幾何学的構造を捉えます。双対空間とは、情報空間の要素である確率分布に対応する線型関数の空間を指します。共役座標は、情報空間における座標変換を表現するために導入され、情報幾何学の理論的展開において重要な役割を果たします。共役座標を用いることで、情報空間上の問題をより簡単な形で解析することが可能となります。
3.5. 混合分布族と指数分布族
情報幾何学では、混合分布族や指数分布族などの確率分布のクラスに注目します。これらの分布族は、情報幾何学の理論が適用しやすい構造を持っているため、研究の対象とされています。
混合分布族は、複数の確率分布の重み付け和で表される分布の集合です。混合分布族は、単一の分布では表現が難しいデータの特徴を捉えることができます。情報幾何学の手法を用いることで、混合分布の推定やクラスタリングなどの問題に対処できます。
指数分布族は、自然パラメータによって表現される確率分布のクラスです。指数分布族は、情報幾何学の観点から見ると、曲率や座標変換が簡単に扱える特徴があります。そのため、情報幾何学を用いた機械学習や最適化問題において、指数分布族が重要な役割を果たします。
4. アルゴリズムと応用
4.1. 情報幾何学に基づく機械学習
情報幾何学は、機械学習の多くの分野で役立つ理論的枠組みを提供します。例えば、情報幾何学の手法を用いて、パラメータ空間における学習アルゴリズムの振る舞いを解析したり、新しい学習アルゴリズムを設計したりすることができます。代表的な応用例には、ニューラルネットワークの学習アルゴリズムや、情報幾何学的最適化手法を用いたサポートベクターマシンがあります。
4.2. 最適化アルゴリズム
情報幾何学は、最適化アルゴリズムの設計や解析にも活用されています。特に、勾配降下法やニュートン法のような最適化手法は、情報幾何学的な視点から自然勾配降下法や共役勾配法という新しいアルゴリズムに拡張することができます。これらの拡張手法は、パラメータ空間のリーマン幾何構造を考慮することで、従来の最適化手法に比べて効率的な学習が可能になります。
4.3. 情報幾何的アプローチによる信号処理
情報幾何学は、信号処理や画像処理にも応用されています。ダイバージェンスやフィッシャー情報行列を用いることで、信号の類似度や距離を評価する新しい手法が開発されており、これらの手法は、信号の復元やノイズ除去、圧縮などのタスクに有効です。
4.4. データ分析と可視化
情報幾何学の概念を利用して、データ分析や可視化手法を改善することができます。例えば、主成分分析や多次元尺度構成法を情報幾何学的な視点から拡張することで、より効果的な次元削減やデータの表現が可能になります。また、情報幾何学を用いたt分布確率近傍埋め込み(t-SNE)のような可視化手法は、高次元データのクラスタリングや構造を視覚的に捉えることができます。
4.5. その他の応用
情報幾何学の応用は、上記の分野だけにとどまりません。例えば、統計物理学では、情報幾何学の枠組みが熱力学的な性質を理解するのに役立ちます。また、情報理論との関連性を活用して、通信や符号化理論にも応用されています。さらに、バイオインフォマティクスや医療画像解析など、生命科学や医学の分野でも、情報幾何学の手法が広く利用されています。
5. 情報幾何学の展望
情報幾何学は、過去数十年で多くの発展を遂げ、様々な分野への応用が見られます。本章では、情報幾何学の現在の研究動向や未解決の問題、そして将来の可能性について掘り下げます。
5.1. 現在の研究動向
近年の情報幾何学の研究動向は以下のようにまとめられます。
深層学習との統合: 情報幾何学は、深層学習の最適化手法やアーキテクチャ設計において新たなインサイトを提供しています。例えば、自然勾配法や情報幾何的平均を用いたアンサンブル学習などが注目されています。
ベイズ推論の進展: 情報幾何学は、ベイズ推論における事前分布や事後分布の選択、モデル比較などに有用な情報を提供しています。リーマン多様体上のサンプリング技術やモデル選択基準の開発も進められています。
高次元データの解析: 高次元データの解析において、情報幾何学はデータ圧縮や次元削減、クラスタリング、可視化などに有用な手法を提供しています。特に、情報幾何的散布図や多様体学習が注目されています。
5.2. 未解決の問題
情報幾何学は多くの進展を遂げていますが、まだ解決されていない問題も存在します。
理論の一般化: 現在の情報幾何学の理論は、主に指数分布族に基づいています。しかし、現実の問題に適用する際には、より一般的な確率分布族に対応する理論の拡張が求められます。
計算効率の向上: 情報幾何学に基づくアルゴリズムは、しばしば高次元データや大規模なデータセットに対して計算コストが高くなります。より効率的なアルゴリズムや計算手法の開発が求められています。
応用範囲の拡大: 情報幾何学は多くの分野で応用されていますが、まだまだ活用できる分野が存在します。新たな応用分野への展開や異なるドメイン間での相互作用を促進する研究が必要です。
5.3. 将来の可能性
情報幾何学の将来の可能性は以下のように考えられます。
自動機械学習(AutoML)への応用: 自動機械学習では、最適なモデル構造やアルゴリズムを自動的に探索・選択することが求められます。情報幾何学は、モデル空間の構造を理解し、効率的な探索を行うための新たな手法を提供することが期待されます。
強化学習の改善: 強化学習では、エージェントが環境と相互作用しながら最適な方策を学習します。情報幾何学は、学習過程の理解や方策空間の構造化に貢献し、強化学習アルゴリズムの改善や新たな手法の開発につながることが期待されます。
複雑ネットワークの解析: 複雑ネットワークは、社会ネットワークや生物ネットワークなど、多様な現象を記述するための枠組みです。情報幾何学は、ネットワーク構造の解析やダイナミクスの理解に有用な情報を提供し、ネットワーク科学の発展に寄与することが期待されます。
情報幾何学は、今後も研究や応用の幅を広げることが期待される分野です。新たな理論の発展や計算効率の向上、さらなる応用範囲の拡大によって、情報幾何学はさらに重要な位置づけとなる可能性があります。
6. まとめ
情報幾何学の基本概念から理論、応用、展望までをまとめてみました。情報幾何学は、確率分布を幾何学的に捉えることで、データ解析や機械学習におけるアルゴリズムや理論の開発に大きく貢献しています。特に、フィッシャー情報行列やダイバージェンスといった情報幾何学の基本概念は、多くの分野で幅広く活用されています。
また、情報幾何学に基づく最適化アルゴリズムやデータ分析手法は、機械学習や信号処理などの応用分野で注目を集めており、今後の発展が期待されています。
深層学習モデルのメモリ節約方法まとめ
目次
- はじめに
- モデルアーキテクチャの最適化
- 学習プロセスの最適化
- データパイプラインの最適化
- ハードウェアの最適化
- メモリプロファイリングとモニタリング
- まとめ
はじめに
近年、深層学習モデルは画像認識、自然言語処理、強化学習など、様々な分野で驚異的な成果を挙げています。しかし、これらのモデルは大量のメモリを消費することが一般的であり、そのためにリソースの制約が問題となることがあります。本ブログでは、深層学習モデルのメモリ節約方法を体系的にまとめ、リソースの制約を克服するためのアプローチを紹介します。
深層学習モデルのメモリ使用について
深層学習モデルは、モデルのパラメータ数や層の深さ、学習データの大きさなどによって、メモリ使用量が大きく異なります。一般的に、より複雑で大規模なモデルは、高い精度を達成することができますが、同時にメモリ使用量も増加します。これは、計算リソースやストレージ容量に制約がある場合、モデルの学習や推論に影響を与える可能性があります。
メモリ節約方法の重要性
メモリ節約方法を適用することで、深層学習モデルの学習や推論を効率的に行うことができます。これにより、ハードウェアリソースを最大限に活用し、コストや時間を削減することが可能となります。また、メモリ節約方法を適用することで、リソースの制約がある環境でも、大規模な深層学習モデルを扱うことができるようになります。これは、特にエッジデバイスや低スペックのハードウェアでの深層学習の適用において重要な意味を持ちます。
本ブログでは、モデルアーキテクチャの最適化、学習プロセスの最適化、データパイプラインの最適化、ハードウェアの最適化、メモリプロファイリングとモニタリングといった、深層学習モデルのメモリ節約方法について解説していきます。これらの方法を適切に適用することで、限られたリソースの中でも効果的に深層学習モデルを学習・実行することができるようになります。また、これらの方法は、様々なシチュエーションに応じて組み合わせて適用することが可能です。以下の章では、それぞれの節約方法を詳細に説明し、実際の深層学習プロジェクトにおいてどのように適用するかを示していきます。
モデルアーキテクチャの最適化
深層学習モデルのメモリ使用量を削減するためには、モデルアーキテクチャの最適化が重要です。このセクションでは、モデルサイズの縮小、モデルの複雑さを減らす方法、量子化、および蒸留といった最適化手法を紹介します。
モデルサイズの縮小
モデルサイズを縮小する方法の一つは、パラメータ数の削減です。パラメータ数を減らすことで、モデルが占めるメモリ容量を減らすことができます。具体的には、以下のような手法があります。
畳み込み層や全結合層のフィルタ数やユニット数を減らす ネットワークの層数を減らす ただし、パラメータ数を削減しすぎると、モデルの表現力が低下し、精度が悪化することがあるため注意が必要です。
モデルの複雑さを減らす
モデルの複雑さを減らすことで、計算量やメモリ使用量を削減できます。例えば、以下のような方法が考えられます。
疎な結合や重み共有を用いることで、パラメータ数を減らす グループ畳み込みやDepthwise Separable Convolutionのような効率的な畳み込み手法を使用する
量子化 (Quantization)
量子化は、モデルのパラメータをよりコンパクトな形式で表現する手法です。例えば、32ビット浮動小数点数を16ビットに圧縮することで、メモリ使用量を半分に削減できます。量子化の種類には、以下のようなものがあります。
- 重みの量子化: モデルの重みをより少ないビット数で表現する
- 活性化関数の量子化: 中間層の出力をより少ないビット数で表現する
量子化は、精度の低下を最小限に抑えつつ、メモリ使用量と計算速度の向上を実現します。
蒸留 (Distillation)
蒸留は、大規模で複雑なモデル(先生モデル)から、より小さなモデル(生徒モデル)に知識を伝える手法です。蒸留では、生徒モデルが先生モデルの出力を模倣するように学習します。具体的には、以下の手順で行われます。
先生モデルを通常通り学習させて、高い精度を達成します。 先生モデルの出力(通常はsoftmaxの前のlogits)と、同じデータを使って生徒モデルを学習させます。 生徒モデルが先生モデルの出力に近づくように、損失関数を設計し最適化を行います。 蒸留は、生徒モデルが先生モデルと同等の性能を持ちつつ、より小さいメモリサイズで実現することを目指します。ただし、蒸留の際には、生徒モデルの容量(層数やユニット数など)や損失関数の設計が重要になります。適切な設定を行うことで、メモリ使用量の削減と計算速度の向上が期待できます。
学習プロセスの最適化
深層学習モデルの学習プロセスは、計算リソースとメモリ使用量に大きな影響を与えます。このセクションでは、学習プロセスを最適化する方法をいくつか紹介し、メモリ使用量を削減しながら効率的にモデルを学習させる方法について説明します。
ミニバッチサイズの調整
ミニバッチサイズは、一度に学習するデータのサンプル数を指します。ミニバッチサイズが大きいほど、GPUの並列処理能力を最大限活用できますが、同時にメモリ使用量も増加します。ミニバッチサイズを小さくすることでメモリ使用量を削減できますが、計算効率が低下する可能性があります。ミニバッチサイズを適切に調整することで、メモリ使用量と計算効率のバランスを最適化できます。
勾配チェックポイント法 (Gradient Checkpointing)
勾配チェックポイント法は、バックプロパゲーション時に必要な中間層の値をすべて保持せず、特定のチェックポイントでのみ保存することでメモリ使用量を削減する手法です。逆伝播時には、保存されたチェックポイントから中間層の値を再計算します。この方法では、メモリ使用量と計算時間のトレードオフが生じますが、適切なチェックポイントを選択することでメモリ節約効果が大きくなります。
Mixed Precision 学習
Mixed Precision 学習は、単精度 (FP32) と半精度 (FP16) の浮動小数点数を組み合わせて使用することで、計算速度を向上させつつメモリ使用量を削減する手法です。通常、重みや勾配の更新には高い精度が求められますが、順伝播や逆伝播の計算過程では必ずしも高い精度が必要ではありません。半精度の浮動小数点数を使用することで、メモリ使用量を削減しつつ、計算速度も向上させることができます。さらに、NVIDIAのTensor Coreを活用することで、Mixed Precision 学習のパフォーマンスを向上させることができます。
Mixed Precision 学習を実装する際には、次の手順に従います。
- モデルとオプティマイザーの重みを FP16 にキャストする
- 損失スケーリングを適用して、FP16 の数値安定性を保つ
- 順伝播と逆伝播の計算を FP16 で実行する
- 勾配を FP32 にキャストし、オプティマイザーで重みを更新する
多くの深層学習フレームワークは、Mixed Precision 学習を容易に実装できるツールを提供しています。例えば、PyTorch では torch.cuda.amp パッケージを使用することで、簡単に Mixed Precision 学習を導入できます。
Mixed Precision 学習を適用することで、メモリ使用量を削減しつつ、学習速度も向上させることができます。ただし、すべてのモデルやタスクに対して効果があるわけではなく、実際の効果は実験によって確認する必要があります。
データパイプラインの最適化
データパイプラインは、深層学習モデルの学習プロセスにおいて重要な役割を果たします。データの効率的な取り扱いが、モデルのメモリ使用量に大きな影響を与えるため、最適化が必要です。このセクションでは、データパイプラインの最適化について解説します。
データの前処理とオンデマンド読み込み
データの前処理は、学習に適した形式にデータを変換するプロセスです。前処理を効率的に行うことで、データのサイズを削減し、メモリ使用量を抑えることができます。また、オンデマンドでデータを読み込むことで、必要なデータだけをメモリに格納し、不要なデータのメモリ使用を避けることができます。
データキャッシングとデータの効率的な格納
データキャッシングは、一度読み込んだデータを一時的に保持することで、再利用が可能になります。これにより、データの再読み込みや前処理のコストを削減し、メモリ使用量を抑えることができます。ただし、キャッシュサイズやキャッシュポリシーを適切に設定することが重要です。
また、データの効率的な格納には、データの圧縮やスパース表現を利用することが有効です。これにより、データサイズを削減し、メモリ使用量を最小限に抑えることができます。
データの圧縮とデコード
データの圧縮は、データサイズを削減し、メモリ使用量を抑える効果があります。特に、画像や音声などの大容量データを扱う際に有効です。データ圧縮には、損失圧縮(JPEGやMP3など)や無損失圧縮(PNGやFLACなど)があります。一方、圧縮されたデータを利用する際には、デコード処理が必要となります。デコード処理は、計算リソースを消費するため、効率的なデコードアルゴリズムの選択や、デコード処理の最適化が重要となります。
効率的なデコードアルゴリズムを選択する際には、データの特性やモデルの要件を考慮することが必要です。例えば、リアルタイム性が求められるアプリケーションでは、高速なデコードが可能なアルゴリズムを選択することが適切です。また、デコード処理を並列化することで、処理速度を向上させることができます。
データの圧縮・デコードを最適化することで、データパイプライン全体のメモリ使用量を削減し、深層学習モデルの学習プロセスを効率化することができます。ただし、圧縮・デコードの手法を選択する際には、データの品質やアプリケーションの要件を考慮することが重要です。
ハードウェアの最適化
深層学習モデルのメモリ消費を抑えるために、ハードウェアの最適化も重要な要素です。この章では、GPUメモリの効率的な利用、TPUを利用したメモリ節約、およびメモリ節約のためのハードウェア選択について説明します。
GPUメモリの効率的な利用
GPUは深層学習モデルの学習と推論に非常に効果的ですが、メモリ容量に制約があります。GPUメモリの効率的な利用を実現する方法はいくつかあります。
複数のGPUを用いた並列処理: 複数のGPUを使用してモデルを分割し、各GPUで異なる層やデータを処理します。これにより、大規模なモデルも効率的に学習・推論できます。 メモリプールの活用: GPUメモリプールを使用すると、異なるサイズのテンソルを効率的にアロケート・デアロケートできます。これにより、メモリ断片化を減らし、GPUメモリ使用効率を向上させます。
TPUを利用したメモリ節約
Tensor Processing Unit (TPU) は、Googleが開発したAIアクセラレータで、深層学習モデルの学習と推論を高速化します。TPUは以下の点でメモリ節約が可能です。
より効率的なメモリアーキテクチャ: TPUは、高速なメモリアクセスを実現する独自のアーキテクチャを持っています。これにより、同じメモリ容量でより大規模なモデルを扱うことができます。 システムオンチップ (SoC) の利用: TPUは、メモリとプロセッサが同じチップ上に統合されたシステムオンチップ (SoC) です。これにより、メモリアクセスの効率が向上し、消費電力も抑えられます。
メモリ節約のためのハードウェア選択
ハードウェア選択もメモリ節約に大きな影響を与えます。以下の点に注意して、最適なハードウェアを選択しましょう。
- メモリ容量の選択: より大容量のメモリを持つGPUやTPUを選択することで、大規模なモデルの学習や推論が可能になります。しかし、コストとのバランスを考慮する必要があります。
- メモリ帯域幅: 高いメモリ帯域幅を持つハードウェアは、データ転送速度が速く、メモリアクセスの効率が向上します。これにより、メモリ使用量を最小限に抑えつつ、高速な学習・推論が可能になります。
- メモリ種類の選択: 現在、GDDR6やHBM2など、さまざまな種類のメモリがGPUやTPUに搭載されています。これらのメモリは、それぞれ異なる性能やコストを持っているため、使用目的に応じて適切なメモリ種類を選択することが重要です。
- 低消費電力のハードウェア: 低消費電力のハードウェアは、メモリとプロセッサの効率を向上させることができます。これにより、モデルの学習や推論に必要なメモリ容量が削減され、コストも抑えられます。 メモリ節約のためのハードウェア選択は、モデルの要件や予算に応じて最適なバランスを見つけることが重要です。これらの要素を考慮して、効率的な深層学習モデルの開発を目指しましょう。
メモリプロファイリングとモニタリング
深層学習モデルのメモリ節約方法を実践する上で、メモリプロファイリングとモニタリングは重要な役割を果たします。これらの手法を利用することで、モデルのメモリ使用状況を把握し、パフォーマンスを最適化することができます。
メモリプロファイリングツールの紹介
メモリプロファイリングツールは、深層学習モデルのメモリ使用状況を可視化し、解析するためのツールです。以下に、いくつかの主要なメモリプロファイリングツールを紹介します。
- TensorFlow Profiler: TensorFlowを利用している場合、組み込みのTensorFlow Profilerを使用することで、GPUメモリ使用状況やオペレーションの実行時間を詳細に調査できます。
- PyTorch Profiler: PyTorchユーザーは、PyTorch Profilerを利用して、モデルのメモリ使用状況と実行速度を分析できます。
- NVIDIA Nsight: NVIDIAのGPUを使用している場合、NVIDIA NsightはGPUのメモリ使用状況やパフォーマンスを詳細に分析するための強力なツールです。
- Memory Profiler: Pythonベースのアプリケーションのメモリ使用状況を調査する際に便利なツールで、特定の関数やコードブロックのメモリ使用量を調べることができます。
モニタリングを通じたメモリ使用状況の理解
メモリプロファイリングツールを使用することで、モデルのメモリ使用状況をリアルタイムでモニタリングできます。モニタリングを通じて、以下のような情報を得ることができます。
- メモリ使用量のピーク: 学習中や推論時にメモリ使用量が最も高くなるタイミングを特定し、その原因を調査します。
- メモリリーク: メモリが解放されずに蓄積される状況を特定し、修正することで、メモリ使用効率を向上させることができます。
- オペレーションの実行時間:オペレーションの実行時間: 各オペレーションがどれだけの時間を要し、どれだけのメモリを消費しているかを把握することで、パフォーマンスのボトルネックとなる部分を特定できます。
パフォーマンスの評価と最適化
メモリプロファイリングとモニタリングの結果を元に、モデルのパフォーマンスを評価し、最適化を行うことができます。以下のアプローチを取ることができます。
メモリ使用量の最適化: メモリ使用量が高いオペレーションや層を特定し、それらを最適化することで全体のメモリ使用量を削減できます。例えば、不要な層やオペレーションを削除したり、より効率的なアルゴリズムを適用したりできます。 実行速度の最適化: オペレーションの実行時間を短縮することで、モデルの学習や推論速度を向上させることができます。具体的には、並列化、ハードウェアアクセラレーションの活用、アルゴリズムの改善などが考えられます。
メモリリークの修正: メモリリークを特定し、それを修正することで、メモリ使用効率を向上させることができます。具体的には、不要なオブジェクトの削除やリソース解放の改善があります。 これらのアプローチを適用することで、深層学習モデルのメモリ使用効率を向上させることができます。メモリプロファイリングとモニタリングを継続的に行い、改善の余地がある部分を特定し、最適化を進めていくことが重要です。
まとめ
本ブログでは、深層学習モデルのメモリ節約方法について体系的にまとめました。メモリの使用量を抑えることで、以下のような効果が期待できます。
- より大規模なデータセットやモデルを扱えるようになる
- 学習時間の短縮や効率的な計算リソースの利用が可能になる
- ハードウェアコストの削減や省電力化が実現できる
- 結果として、開発サイクルの短縮や競争力の向上が期待できる
チューリングテスト:そのコンピュータは知性を持つか
チューリングテストの概要
チューリングテストは、コンピュータが人間のように考える能力を持っているかどうかを評価するための試験です。このテストは、イギリスの数学者でありコンピュータ科学の父とも言われるアラン・チューリングによって提案されました。本記事では、チューリングテストの概要と、それに関連する歴史的背景について説明します。
アラン・チューリングとは
アラン・チューリング(1912-1954)は、イギリスの数学者であり、暗号解読や計算機科学の分野で多大な貢献を果たしました。彼は、第二次世界大戦中にドイツ軍の暗号「エニグマ」を解読するための機械を開発し、戦争を短縮することに大きく貢献しました。また、チューリングは計算機科学の基礎を築き、現代のコンピュータの基本概念である「チューリングマシン」を提案しました。
チューリングテストの歴史
チューリングテストは、1950年にアラン・チューリングが発表した論文「Computing Machinery and Intelligence(計算機と知性)」において初めて提案されました。彼は、コンピュータが人間と同じように知性を持つかどうかを評価するための基準を考案する必要性を感じていました。チューリングは、その基準としてイミテーション・ゲーム(模倣ゲーム)を提案しました。
イミテーション・ゲームは、人間の審判者がコンピュータと人間の両方と対話を行い、どちらがコンピュータであるかを見分けることができなければ、そのコンピュータは人間と同等の知性を持つと判断されるというものです。これが後に「チューリングテスト」として広く認知されるようになりました。
チューリングテストは、人工知能(AI)の研究や発展において重要な役割を果たし、その後のAI評価基準に大きな影響を与えました。また、人間の知性や意識についての議論や哲学的な問題提起にも繋がっています。チューリングテストは、人間の知性とは何か、そして機械が知性を持つことができるのかという根源的な問いについて考えるきっかけを提供してくれます。
チューリングテストの提案以降、多くの研究者や技術者がこのテストに挑戦し、より人間らしい会話を行うことができるAIプログラムの開発が進んでいます。ELIZAやPARRYなどの初期のAIシステムから、近年のOpenAIのGPTシリーズなど、人間と区別がつかないほど質の高い自然言語処理が可能なAIまで、チューリングテストは人工知能の発展に大きく寄与してきました。
チューリングテストの存在は、人間と機械の関係や、技術革新が倫理や社会に与える影響についての議論を促進し続けています。また、チューリングテストの限界や批判も存在し、チャイニーズルームのような哲学的な議論が生まれるきっかけともなっています。これらの問題提起は、人工知能の研究や開発において、より深い理解や新たな評価方法を模索する動機付けとなっています。
チューリングテストは、現代の人工知能研究やコンピュータ科学の歴史において重要な位置を占めており、今後もその意義や影響が続いていくことでしょう。このテストを通して、我々は人間の知性や意識についての理解を深め、技術と倫理の関係をよりよく考慮することができるようになることを期待できます。
チューリングテストの目的
チューリングテストは、人工知能の能力を評価するために開発された一連の試験です。その主な目的は、人工知能が人間のような知性や意識を持っているかどうかを判断することです。
人工知能の評価基準
人工知能(AI)の発展に伴い、AIの性能を評価する方法が必要とされました。チューリングテストは、AIが人間と同等の知性を持っているかどうかを評価する基準として提案されました。具体的には、AIが人間と会話を行う際に、対話相手がそれが人間かAIかを見分けられない程度に賢いと判断された場合、そのAIはチューリングテストに合格したとされます。
意識と知性の判別
チューリングテストは、人間の意識と知性を機械に再現できるかどうかを試す目的でもあります。AIが会話を通じて感情や意識を理解し、それに適切に反応できるようになれば、AIは人間と同等の知性や意識を持っていると考えられるでしょう。このようなAIの開発は、人間と機械の相互理解や協力を促進し、多くの分野での応用が期待されます。チューリングテストは、このような目標に向けた重要なステップとなる評価基準を提供しています。
チューリングテストの方法
チューリングテストは、コンピュータプログラムが人間の知性を持っているかどうかを判定するための試験です。以下では、テストの方法について詳しく説明します。
イミテーション・ゲーム
チューリングテストは、アラン・チューリングが提案したイミテーション・ゲームをベースにしています。イミテーション・ゲームでは、人間の判断者がコンピュータプログラムと人間の対話者との会話を観察し、どちらが人間であるかを判断します。判断者がコンピュータプログラムを人間と見分けられない場合、そのプログラムは知性を持っていると見なされます。
テストのプロセス
チューリングテストのプロセスは以下の通りです。
判断者、コンピュータプログラム、および人間の対話者が遠隔地に配置される。 判断者はコンピュータプログラムと人間の対話者の両方とテキストベースでやり取りを行う。 判断者は質問を投げかけ、両者からの回答を比較して、どちらが人間かを推測する。 ゲームが終了した後、判断者が正しい結果を出す割合に基づいて、コンピュータプログラムが知性を持っているかどうかが評価される。
対話者の役割
チューリングテストにおいて、対話者は以下の役割を担っています。
コンピュータプログラム: 人間のような知性を持っているかどうかを証明しようとする。そのため、できるだけ自然な言葉で判断者と対話し、人間の対話者と区別がつかないように努める。
人間の対話者: 判断者に自分が人間であることを証明しようとする。そのため、自然な言葉で判断者と対話し、コンピュータプログラムと区別がつくように努める。
判断者: コンピュータプログラムと人間の対話者を見分けようとする。そのため、両者に質問を投げかけ、回答を比較してどちらが人間かを判断する。
このように、チューリングテストでは、判断者、コンピュータプログラム、および人間の対話者が互いに異なる役割を持ち、それぞれが目的を達成しようと努力します。この過程を通じて、コンピュータプログラムが人間と区別がつかないほどの知性を持っているかどうかが評価されます。
チューリングテストの実施にあたっては、以下の点に注意が必要です。
テスト環境: チューリングテストは、判断者が対話者の外見や声に惑わされないよう、通常テキストベースのコミュニケーションで行われます。これにより、判断者がコンピュータプログラムと人間の対話者を純粋に言葉のやり取りだけで評価できるようになります。
質問の範囲: チューリングテストでは、判断者が対話者に対して自由に質問を投げかけることができます。このため、判断者はさまざまなトピックや複雑な質問を用いて、コンピュータプログラムの知性や会話能力を試すことができます。
評価基準: チューリングテストの評価基準は、判断者がコンピュータプログラムを人間と見分けられない割合に基づいています。チューリング自身は、判断者が50%以上の確率でコンピュータプログラムを人間と見分けられない場合、そのプログラムは知性を持っていると見なされると提案しました。
チューリングテストは、人工知能の知性を評価するための一つの方法として広く認知されていますが、その有効性や限界については議論が続いています。
チューリングテストの限界と批判
チューリングテストは、人工知能の評価基準として広く認識されていますが、その限界と批判も多く存在します。本章では、チューリングテストの主な限界と批判について解説します。
チャイニーズルーム
チャイニーズルームは、哲学者ジョン・サールが提唱した思考実験で、チューリングテストの限界を示すものです。この実験では、部屋の中にいる人が中国語を理解できないにもかかわらず、外から投げ込まれる中国語の質問に対して適切な答えを返すことができるとします。彼はあらかじめ与えられたルールに従って、適切な答えを作成し、外に返しています。このシナリオでは、部屋の人は中国語を理解していると思われるかもしれませんが、実際には理解していません。この実験は、単に外見上の振る舞いを模倣するだけの人工知能が真の知性や意識を持っているとは限らないことを示しています。
チューリングテストの範囲
チューリングテストは、人間の知性を持つかどうかをテキストベースの対話を通じて評価するため、知性の多くの側面をカバーしていません。例えば、視覚、音声、感覚、運動機能などの能力は、チューリングテストでは評価できません。また、テストは文化的背景や専門知識に偏りがある可能性があり、公平な評価が難しいという問題も指摘されています。
代替評価方法
チューリングテストの限界を踏まえ、様々な代替評価方法が提案されています。代表的なものとして、アラン・ニューウェルとハーバート・A・サイモンが提唱した「物理記号仮説」や、ダニエル・デネットが提案した「意味の多様性」が挙げられます。物理記号仮説は、知性を持つシステムが適切な記号操作を行うことで知的行為を実現できるとする仮説であり、意味の多様性は、知性や意識の評価において、複数の解釈や説明を持つことが重要であると主張します。これらの代替評価方法は、知性や意識の判断基準を多角的に捉えることを目指しています。
また、人工知能の評価には、機能やタスクに特化した基準も存在します。例えば、画像認識の精度を評価する際には、ImageNetやCOCOといったデータセットを用いたベンチマークテストが一般的です。同様に、自然言語処理の能力を評価する場合、GLUEやSuperGLUEといったベンチマークが利用されます。これらの評価基準は、人工知能が特定のタスクをどれだけ達成できるかを定量的に評価することができるため、チューリングテストのような質的な評価とは異なる視点から人工知能の性能を判断できます。
これらの代替評価方法を用いることで、チューリングテストの限界を補完し、人工知能の知性や意識に関する理解を深めることが期待されます。しかし、これらの方法も完全な評価基準とは言い難く、引き続き人工知能の知性や意識をどのように評価すべきかについての議論が続くでしょう。
チューリングテストの成功例
チューリングテストにおいて、人間と見分けがつかないほどの対話能力を持つとされるAIの例をいくつか紹介します。
ELIZA
ELIZAは、1964年にジョセフ・ワイゼンバウムによって開発された初期の自然言語処理プログラムです。特に、その中のDOCTORスクリプトは、ロジャー・シャンクの脚本理論に基づいて、精神分析家の役割を模倣し、ユーザーからの入力に応じて質問や返答を生成します。ELIZAは、基本的なパターンマッチング技術を使用していたため、実際の理解や意識は持っていませんでしたが、当時の多くの人々は、ELIZAとの会話が人間のように感じられると評価しました。
PARRY
PARRYは、1972年にスタンフォード大学のカール・ヴィーツェンバウムによって開発されました。このプログラムは、統合失調症患者の思考や行動を模倣することを目的としており、ELIZAよりも高度な知識表現や推論能力を持っています。PARRYは、自然言語処理の進歩により、より人間らしい会話を生成することが可能になりました。実際、PARRYはチューリングテストをいくつか通過し、専門家や一般の人々からも、人間と見分けがつかないと評価されました。
エウジニー・ゴードンストーン
エウジニー・ゴードンストーンは、2008年にローレンス・リーブによって開発された、自然言語処理と知識表現を用いた人工知能プログラムです。このプログラムは、ウェブ上の情報を自動的に収集し、その知識を利用してユーザーとの対話を行います。エウジニー・ゴードンストーンは、2008年、2010年、2011年にローブナー賞を受賞し、人間のような会話能力を持つと評価されました。
OpenAIのGPTシリーズ
OpenAIのGPT(Generative Pre-trained Transformer)シリーズは、深層学習技術を用いて自然言語生成を行うAIです。最新のバージョンであるGPT-4は、数百GPT-4は、数百億のパラメータを持ち、ウェブ上の膨大なテキストデータを事前学習することで、幅広い知識を獲得しています。このAIは、質問応答、文章生成、翻訳、要約など、多様なタスクにおいて高い性能を発揮し、人間と区別がつかないレベルの自然言語生成能力を持っているとされています。GPTシリーズは、チューリングテストにおいても高い評価を受けており、AI技術の進化を象徴する存在となっています。
これらの例は、チューリングテストにおいて、AIが人間と見分けがつかないレベルの対話能力を発揮することが可能であることを示しています。また、これらの成功例から、技術の進化に伴ってAIがどのように発展してきたかを理解することができます。今後も、チューリングテストを通じて、さらなるAI技術の発展が期待されています。
チューリングテストの現代的な意義
チューリングテストは、人工知能の発展に関連するさまざまな側面を考慮する上で、現代社会においても重要な意義を持っています。特に、人工知能と倫理、人間と機械の関係、未来の技術革新への影響といったトピックが注目されています。
人工知能と倫理
人工知能(AI)が急速に発展する中、その適用範囲も広がり、倫理的な問題が浮上してきています。チューリングテストは、AIが人間と同等の知性を持つとされる基準の一つであり、その議論においては、AIがどの程度まで人間の権利や責任を持つべきか、そしてその行動がどのように規制されるべきかといった問題が取り上げられます。また、AIが人間の感情や意識を持っているとはどういうことなのか、それが倫理的な取り扱いにどのように影響するのかといった議論も重要です。
人間と機械の関係
チューリングテストは、人間と機械の関係を考える上で興味深い洞察を提供しています。テストが示すように、AIが人間のように振る舞い、コミュニケーションが可能であれば、私たちはそれをどのように扱うべきでしょうか。この問題は、AIがますます私たちの日常生活に浸透し、働き方や対人関係に影響を与える中で、一層重要性を増しています。人間と機械の関係を再評価し、適切なコラボレーションの形を模索することが求められています。
未来の技術革新への影響
チューリングテストは、未来の技術革新に対する示唆に富んでいます。AIが人間と同等の知性を持つと判断される日が来れば、それは様々な産業や社会に大きな変革をもたらすことでしょう。例えば、医療、教育、輸送、エンターテイメントなどの分野でAIがより積極的に活用されることが期待されます。また、AIがクリエイティブな仕事にも進出し、美術、音楽、文学などの分野で新たな芸術作品を生み出す可能性があります。
しかし、これらの技術革新は、雇用やスキルの需要にも影響を与えるため、新たな課題が生じることが予想されます。AIが人間の仕事を置き換える中で、労働市場がどのように変化し、人々がどのように適応していくのかという問題が大きな関心事となります。また、データのプライバシーやセキュリティに関する問題も、技術が進化するにつれて一層重要となります。
チューリングテストは、これらの未来の技術革新への影響を考慮する上で、重要な指標となります。人工知能が人間と同等の知性を持つとされる水準に達することは、多くの変化とチャレンジをもたらすでしょう。そのため、社会全体が適切に対応し、持続可能な未来を築くために、倫理的な問題や人間と機械の関係、技術革新に伴う影響について深く考える必要があります。
まとめ
本記事では、チューリングテストの概要、目的、方法、限界と批判、成功例、および現代的な意義について解説しました。チューリングテストは、人工知能の評価基準として広く知られており、機械が人間の知性を模倣できるかどうかを判別するための試みです。
チューリングテストには限界と批判も存在しますが、それでもなお、人工知能の発展を促す重要な評価基準の一つとして位置づけられています。また、過去にはELIZAやPARRY、エウジニー・ゴードンストーン、OpenAIのGPTシリーズなど、チューリングテストに挑戦し、ある程度の成功を収めた例もあります。
現代的な意義としては、人工知能と倫理、人間と機械の関係、未来の技術革新への影響など、様々な側面でチューリングテストが注目されています。これらの議論を通じて、人工知能技術が持つ可能性や、それに伴う様々な問題を考慮することが重要であると言えるでしょう。
今後も、チューリングテストは人工知能研究の発展を刺激し続けるであろう試金石として、多くの研究者や技術者によって検討されることでしょう。そして、チューリングテストを超える新たな評価基準が登場することで、人工知能技術はさらなる進化を遂げていくことが期待されます。